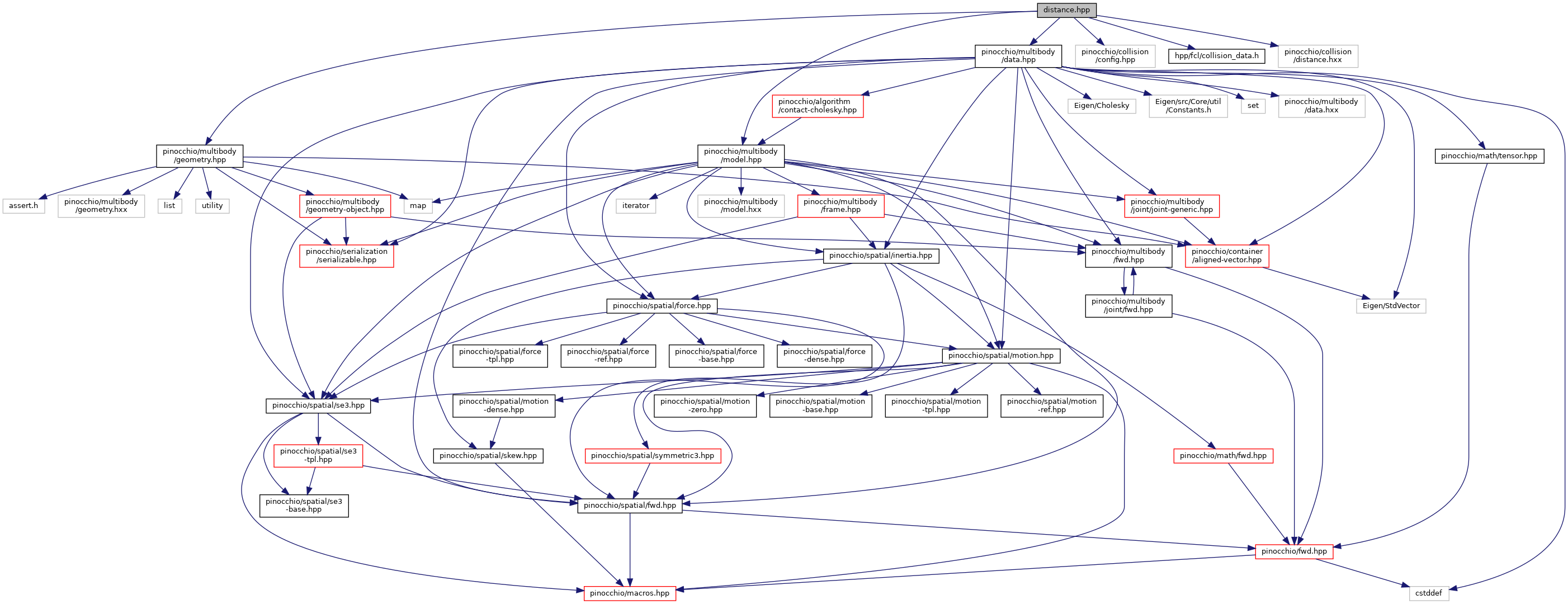
#include "pinocchio/multibody/model.hpp"#include "pinocchio/multibody/data.hpp"#include "pinocchio/multibody/geometry.hpp"#include "pinocchio/collision/config.hpp"#include <hpp/fcl/collision_data.h>#include "pinocchio/collision/distance.hxx"
Include dependency graph for distance.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
Functions | |
| fcl::DistanceResult & | pinocchio::computeDistance (const GeometryModel &geom_model, GeometryData &geom_data, const PairIndex pair_id) |
| Compute the minimal distance between collision objects of a SINGLE collison pair. More... | |
| std::size_t | pinocchio::computeDistances (const GeometryModel &geom_model, GeometryData &geom_data) |
| Compute the minimal distance between collision objects of a ALL collison pair. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType > | |
| std::size_t | pinocchio::computeDistances (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const GeometryModel &geom_model, GeometryData &geom_data) |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType > | |
| std::size_t | pinocchio::computeDistances (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const GeometryModel &geom_model, GeometryData &geom_data, const Eigen::MatrixBase< ConfigVectorType > &q) |