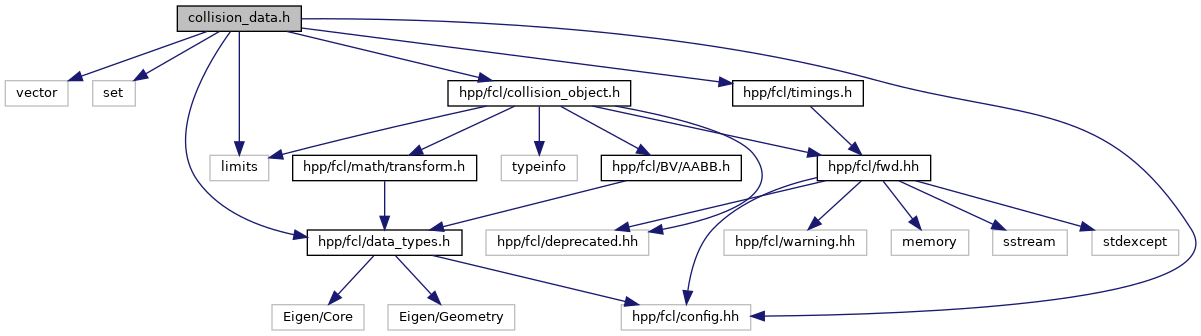
#include <vector>
#include <set>
#include <limits>
#include <hpp/fcl/collision_object.h>
#include <hpp/fcl/config.hh>
#include <hpp/fcl/data_types.h>
#include <hpp/fcl/timings.h>
Go to the source code of this file.
|
| CollisionRequestFlag | hpp::fcl::operator& (CollisionRequestFlag a, CollisionRequestFlag b) |
| |
| CollisionRequestFlag & | hpp::fcl::operator&= (CollisionRequestFlag &a, CollisionRequestFlag b) |
| |
| CollisionRequestFlag | hpp::fcl::operator^ (CollisionRequestFlag a, CollisionRequestFlag b) |
| |
| CollisionRequestFlag & | hpp::fcl::operator^= (CollisionRequestFlag &a, CollisionRequestFlag b) |
| |
| CollisionRequestFlag | hpp::fcl::operator| (CollisionRequestFlag a, CollisionRequestFlag b) |
| |
| CollisionRequestFlag & | hpp::fcl::operator|= (CollisionRequestFlag &a, CollisionRequestFlag b) |
| |
| CollisionRequestFlag | hpp::fcl::operator~ (CollisionRequestFlag a) |
| |
| void | hpp::fcl::internal::updateDistanceLowerBoundFromBV (const CollisionRequest &, CollisionResult &res, const FCL_REAL &sqrDistLowerBound) |
| |
| void | hpp::fcl::internal::updateDistanceLowerBoundFromLeaf (const CollisionRequest &, CollisionResult &res, const FCL_REAL &distance, const Vec3f &p0, const Vec3f &p1) |
| |