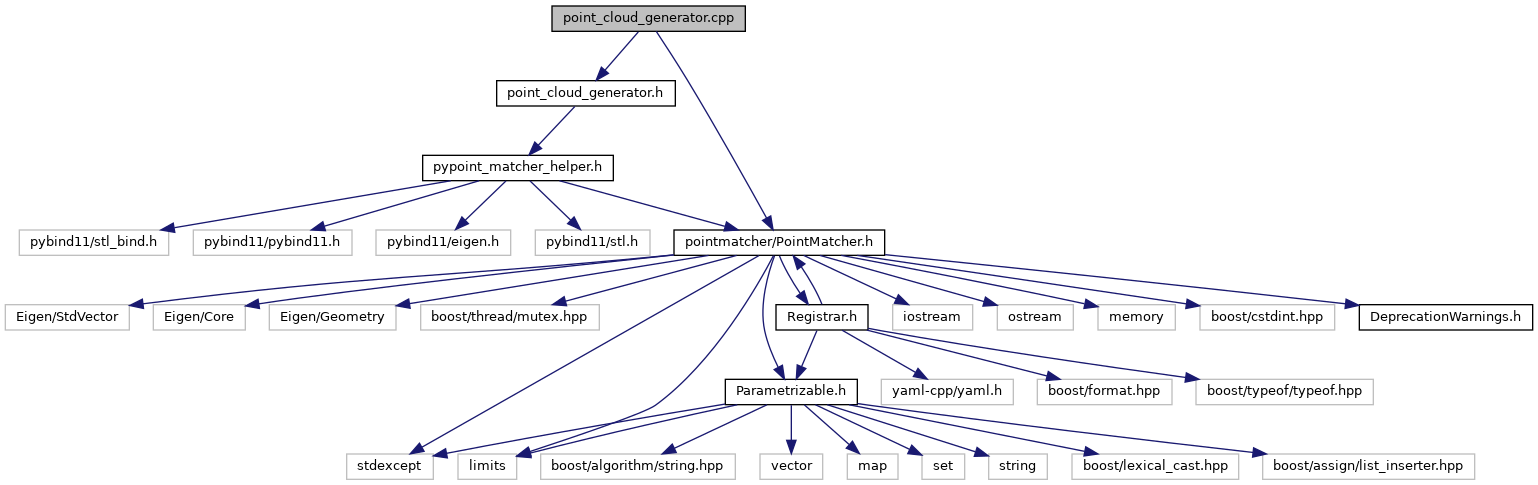
Include dependency graph for point_cloud_generator.cpp:
Go to the source code of this file.
Namespaces | |
| python | |
| python::pointmatcher | |
Functions | |
| void | python::pointmatcher::applyTransformation (const StaticCoordVector &translation, const Eigen::Matrix< ScalarType, 4, 1 > &rotation, DataPoints &pointCloud) |
| Wrapper class that converts general Eigen::Matrix, convertible from numpy array, to Eigen::Quaternion. More... | |
| DataPoints | python::pointmatcher::generateUniformlySampledBoxWrapper (const ScalarType length, const ScalarType width, const ScalarType height, const DataPoints::Index numberOfPoints, const StaticCoordVector &translation, const Eigen::Matrix< ScalarType, 4, 1 > &rotation) |
| Wrapper class that converts general Eigen::Matrix, convertible from numpy array, to Eigen::Quaternion. More... | |
| DataPoints | python::pointmatcher::generateUniformlySampledCircle (const ScalarType radius, const DataPoints::Index numberOfPoints, const StaticCoordVector &translation, const Eigen::Matrix< ScalarType, 4, 1 > &rotation) |
| Wrapper class that converts general Eigen::Matrix, convertible from numpy array, to Eigen::Quaternion. More... | |
| DataPoints | python::pointmatcher::generateUniformlySampledCylinder (const ScalarType radius, const ScalarType height, const DataPoints::Index numberOfPoints, const StaticCoordVector &translation, const Eigen::Matrix< ScalarType, 4, 1 > &rotation) |
| Wrapper class that converts general Eigen::Matrix, convertible from numpy array, to Eigen::Quaternion. More... | |
| DataPoints | python::pointmatcher::generateUniformlySampledPlane (const StaticCoordVector &dimensions, const DataPoints::Index numberOfPoints, const StaticCoordVector &translation, const Eigen::Matrix< ScalarType, 4, 1 > &rotation) |
| Wrapper class that converts general Eigen::Matrix, convertible from numpy array, to Eigen::Quaternion. More... | |
| DataPoints | python::pointmatcher::generateUniformlySampledSphere (const ScalarType radius, const DataPoints::Index numberOfPoints, const StaticCoordVector &translation, const Eigen::Matrix< ScalarType, 4, 1 > &rotation) |
| Wrapper class that converts general Eigen::Matrix, convertible from numpy array, to Eigen::Quaternion. More... | |
| void | python::pointmatcher::pybindPointCloudGenerator (py::module &p_module) |