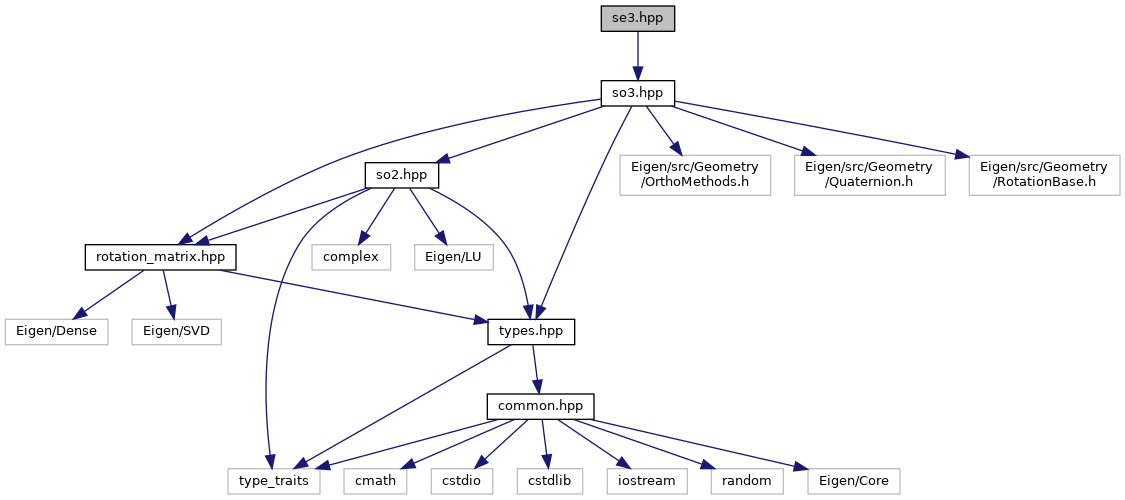
#include "so3.hpp"
Include dependency graph for se3.hpp:
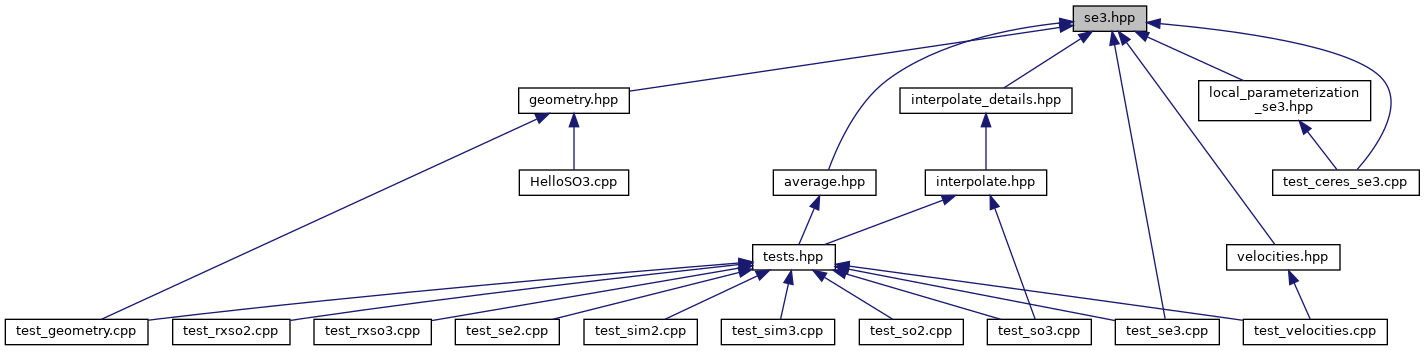
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | Eigen::Map< Sophus::SE3< Scalar_ > const, Options > |
| class | Eigen::Map< Sophus::SE3< Scalar_ >, Options > |
| class | Sophus::SE3< Scalar_, Options > |
| SE3 using default storage; derived from SE3Base. More... | |
| class | Sophus::SE3< Scalar_, Options > |
| SE3 using default storage; derived from SE3Base. More... | |
| class | Sophus::SE3Base< Derived > |
| struct | Eigen::internal::traits< Map< Sophus::SE3< Scalar_ > const, Options > > |
| struct | Eigen::internal::traits< Map< Sophus::SE3< Scalar_ >, Options > > |
| struct | Eigen::internal::traits< Sophus::SE3< Scalar_, Options > > |
Namespaces | |
| Eigen | |
| Eigen::internal | |
| Sophus | |
Typedefs | |
| using | Sophus::SE3d = SE3< double > |
| using | Sophus::SE3f = SE3< float > |
Detailed Description
Special Euclidean group SE(3) - rotation and translation in 3d.
Definition in file se3.hpp.