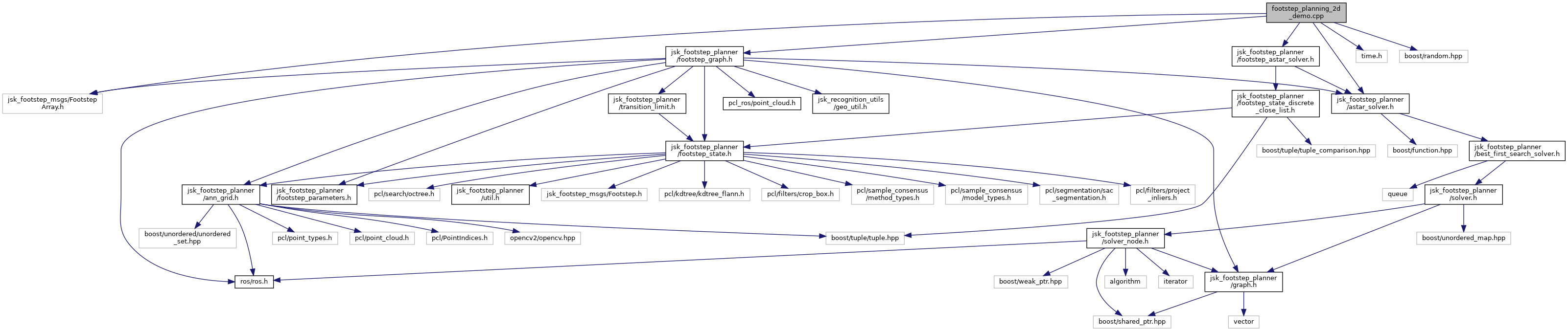
#include <jsk_footstep_msgs/FootstepArray.h>
#include "jsk_footstep_planner/footstep_graph.h"
#include "jsk_footstep_planner/astar_solver.h"
#include "jsk_footstep_planner/footstep_astar_solver.h"
#include <time.h>
#include <boost/random.hpp>
Go to the source code of this file.
|
| const Eigen::Vector3f | footstep_size (0.2, 0.1, 0.000001) |
| |
| int | main (int argc, char **argv) |
| |
| void | plan (double x, double y, double yaw, FootstepGraph::Ptr graph, ros::Publisher &pub_path, ros::Publisher &pub_goal, Eigen::Vector3f footstep_size) |
| |
| const Eigen::Vector3f | resolution (0.05, 0.05, 0.08) |
| |
◆ footstep_size()
◆ main()
| int main |
( |
int |
argc, |
|
|
char ** |
argv |
|
) |
| |
◆ plan()
◆ resolution()