#include <CppUnitLite/TestHarness.h>#include <gtsam/base/TestableAssertions.h>#include <gtsam/base/numericalDerivative.h>#include <gtsam/geometry/Cal3DS2.h>#include <gtsam/geometry/Cal3_S2.h>#include <gtsam/geometry/Point2.h>#include <gtsam/geometry/Point3.h>#include <gtsam/geometry/Pose3.h>#include <gtsam/inference/Symbol.h>#include <gtsam_unstable/slam/ProjectionFactorRollingShutter.h>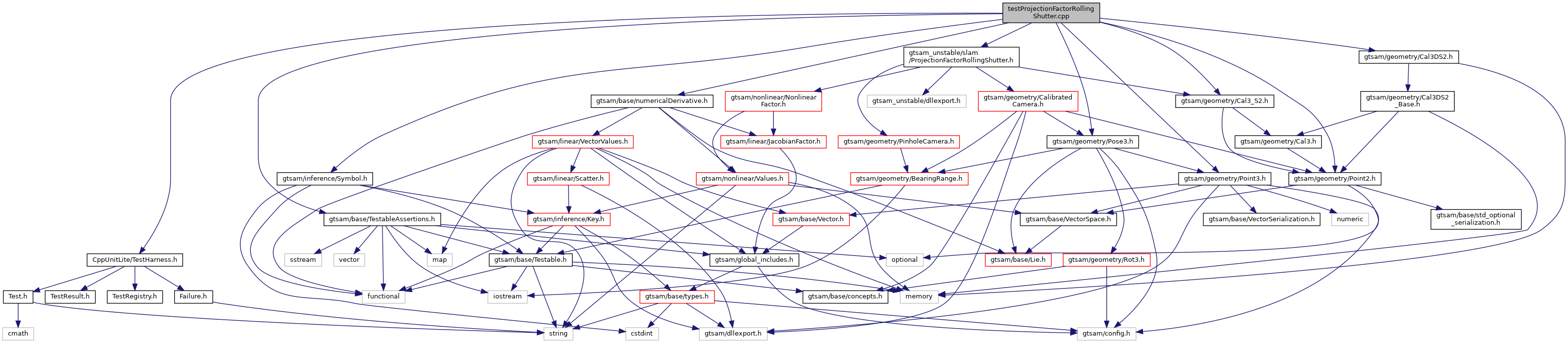
Go to the source code of this file.
Functions | |
| static Cal3_S2::shared_ptr | K (new Cal3_S2(fov, w, h)) |
| int | main () |
| static Point2 | measurement (323.0, 240.0) |
| static SharedNoiseModel | model (noiseModel::Unit::Create(2)) |
| static Key | pointKey (L(1)) |
| static Key | poseKey1 (X(1)) |
| static Key | poseKey2 (X(2)) |
| TEST (ProjectionFactorRollingShutter, cheirality) | |
| TEST (ProjectionFactorRollingShutter, Constructor) | |
| TEST (ProjectionFactorRollingShutter, ConstructorWithTransform) | |
| TEST (ProjectionFactorRollingShutter, Equals) | |
| TEST (ProjectionFactorRollingShutter, EqualsWithTransform) | |
| TEST (ProjectionFactorRollingShutter, Error) | |
| TEST (ProjectionFactorRollingShutter, ErrorWithTransform) | |
| TEST (ProjectionFactorRollingShutter, Jacobian) | |
| TEST (ProjectionFactorRollingShutter, JacobianWithTransform) | |
Variables | |
| static Pose3 | body_P_sensor (Rot3::RzRyRx(-M_PI_2, 0.0, -M_PI_2), Point3(0.25, -0.10, 1.0)) |
| static double | fov = 60 |
| static size_t | h = 480 |
| static double | interp_params = 0.5 |
| static size_t | w = 640 |
Function Documentation
◆ K()
|
static |
◆ main()
| int main | ( | ) |
Definition at line 373 of file testProjectionFactorRollingShutter.cpp.
◆ measurement()
|
static |
◆ model()
|
static |
◆ pointKey()
◆ poseKey1()
◆ poseKey2()
◆ TEST() [1/9]
| TEST | ( | ProjectionFactorRollingShutter | , |
| cheirality | |||
| ) |
Definition at line 284 of file testProjectionFactorRollingShutter.cpp.
◆ TEST() [2/9]
| TEST | ( | ProjectionFactorRollingShutter | , |
| Constructor | |||
| ) |
Definition at line 57 of file testProjectionFactorRollingShutter.cpp.
◆ TEST() [3/9]
| TEST | ( | ProjectionFactorRollingShutter | , |
| ConstructorWithTransform | |||
| ) |
Definition at line 63 of file testProjectionFactorRollingShutter.cpp.
◆ TEST() [4/9]
| TEST | ( | ProjectionFactorRollingShutter | , |
| Equals | |||
| ) |
Definition at line 70 of file testProjectionFactorRollingShutter.cpp.
◆ TEST() [5/9]
| TEST | ( | ProjectionFactorRollingShutter | , |
| EqualsWithTransform | |||
| ) |
Definition at line 95 of file testProjectionFactorRollingShutter.cpp.
◆ TEST() [6/9]
| TEST | ( | ProjectionFactorRollingShutter | , |
| Error | |||
| ) |
Definition at line 120 of file testProjectionFactorRollingShutter.cpp.
◆ TEST() [7/9]
| TEST | ( | ProjectionFactorRollingShutter | , |
| ErrorWithTransform | |||
| ) |
Definition at line 189 of file testProjectionFactorRollingShutter.cpp.
◆ TEST() [8/9]
| TEST | ( | ProjectionFactorRollingShutter | , |
| Jacobian | |||
| ) |
Definition at line 215 of file testProjectionFactorRollingShutter.cpp.
◆ TEST() [9/9]
| TEST | ( | ProjectionFactorRollingShutter | , |
| JacobianWithTransform | |||
| ) |
Definition at line 249 of file testProjectionFactorRollingShutter.cpp.
Variable Documentation
◆ body_P_sensor
◆ fov
|
static |
Definition at line 35 of file testProjectionFactorRollingShutter.cpp.
◆ h
|
static |
Definition at line 36 of file testProjectionFactorRollingShutter.cpp.
◆ interp_params
|
static |
Definition at line 51 of file testProjectionFactorRollingShutter.cpp.
◆ w
|
static |
Definition at line 36 of file testProjectionFactorRollingShutter.cpp.