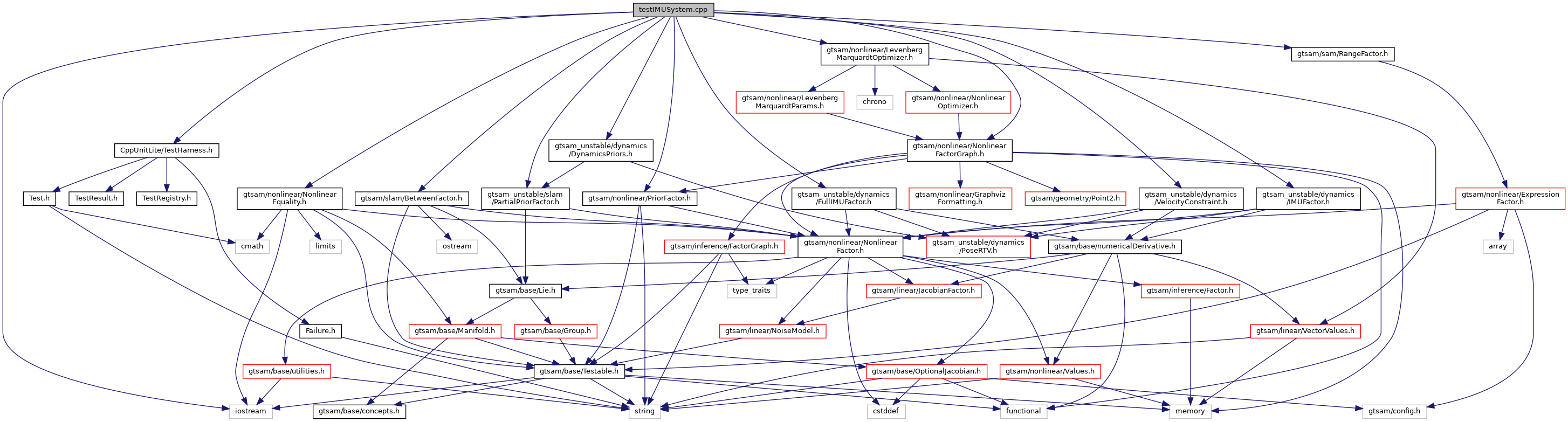
#include <iostream>#include <CppUnitLite/TestHarness.h>#include <gtsam/slam/BetweenFactor.h>#include <gtsam/nonlinear/PriorFactor.h>#include <gtsam/sam/RangeFactor.h>#include <gtsam_unstable/slam/PartialPriorFactor.h>#include <gtsam/nonlinear/NonlinearEquality.h>#include <gtsam/nonlinear/LevenbergMarquardtOptimizer.h>#include <gtsam/nonlinear/NonlinearFactorGraph.h>#include <gtsam_unstable/dynamics/IMUFactor.h>#include <gtsam_unstable/dynamics/FullIMUFactor.h>#include <gtsam_unstable/dynamics/VelocityConstraint.h>#include <gtsam_unstable/dynamics/DynamicsPriors.h>
Include dependency graph for testIMUSystem.cpp:
Go to the source code of this file.
Functions | |
| int | main () |
| TEST (testIMUSystem, instantiations) | |
| TEST (testIMUSystem, linear_trajectory) | |
| TEST (testIMUSystem, optimize_chain) | |
| TEST (testIMUSystem, optimize_chain_fullfactor) | |
Variables | |
| static const Vector | g = Vector::Unit(3,2)*(-9.81) |
| const double | tol =1e-5 |
| static const Key | x0 = 0 |
| static const Key | x1 = 1 |
| static const Key | x2 = 2 |
| static const Key | x3 = 3 |
| static const Key | x4 = 4 |
Function Documentation
◆ main()
| int main | ( | ) |
Definition at line 176 of file testIMUSystem.cpp.
◆ TEST() [1/4]
| TEST | ( | testIMUSystem | , |
| instantiations | |||
| ) |
Definition at line 32 of file testIMUSystem.cpp.
◆ TEST() [2/4]
| TEST | ( | testIMUSystem | , |
| linear_trajectory | |||
| ) |
Definition at line 146 of file testIMUSystem.cpp.
◆ TEST() [3/4]
| TEST | ( | testIMUSystem | , |
| optimize_chain | |||
| ) |
Definition at line 55 of file testIMUSystem.cpp.
◆ TEST() [4/4]
| TEST | ( | testIMUSystem | , |
| optimize_chain_fullfactor | |||
| ) |
Definition at line 101 of file testIMUSystem.cpp.
Variable Documentation
◆ g
|
static |
Definition at line 29 of file testIMUSystem.cpp.
◆ tol
| const double tol =1e-5 |
Definition at line 26 of file testIMUSystem.cpp.
◆ x0
|
static |
Definition at line 28 of file testIMUSystem.cpp.
◆ x1
|
static |
Definition at line 28 of file testIMUSystem.cpp.
◆ x2
|
static |
Definition at line 28 of file testIMUSystem.cpp.
◆ x3
|
static |
Definition at line 28 of file testIMUSystem.cpp.
◆ x4
|
static |
Definition at line 28 of file testIMUSystem.cpp.