Extended Kalman Filter base class on a generic manifold M. More...
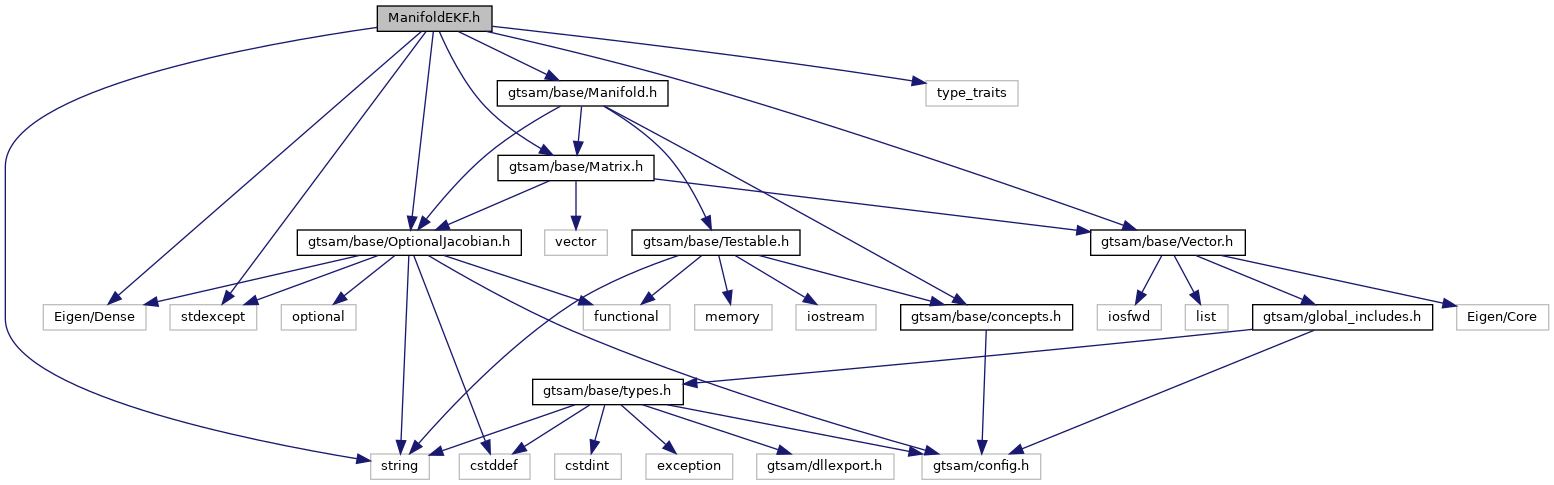
#include <gtsam/base/Matrix.h>#include <gtsam/base/OptionalJacobian.h>#include <gtsam/base/Vector.h>#include <gtsam/base/Manifold.h>#include <Eigen/Dense>#include <string>#include <stdexcept>#include <type_traits>
Include dependency graph for ManifoldEKF.h:
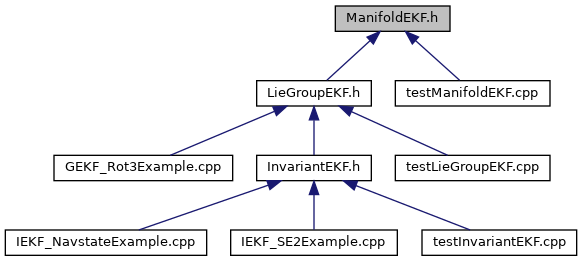
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | gtsam::ManifoldEKF< M > |
| Extended Kalman Filter on a generic manifold M. More... | |
Namespaces | |
| gtsam | |
| traits | |
Detailed Description
Extended Kalman Filter base class on a generic manifold M.
This file defines the ManifoldEKF class template for performing prediction and update steps of an Extended Kalman Filter on states residing in a differentiable manifold. It relies on the manifold's retract and localCoordinates operations.
- Date
- April 24, 2025
Definition in file ManifoldEKF.h.