InvariantEKF on NavState (SE_2(3)) with IMU (predict) and GPS (update) More...
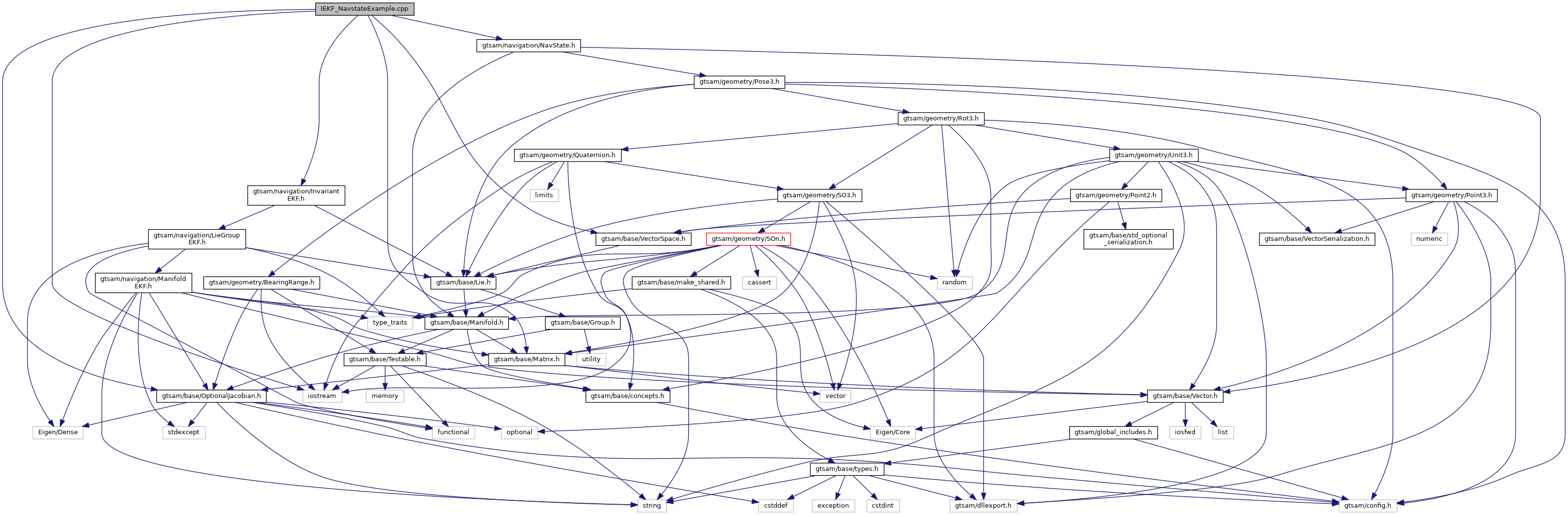
#include <gtsam/base/Matrix.h>#include <gtsam/base/VectorSpace.h>#include <gtsam/base/OptionalJacobian.h>#include <gtsam/navigation/InvariantEKF.h>#include <gtsam/navigation/NavState.h>#include <iostream>
Include dependency graph for IEKF_NavstateExample.cpp:
Go to the source code of this file.
Functions | |
| Vector9 | dynamics (const Vector6 &imu) |
| Left-invariant dynamics for NavState. More... | |
| Vector3 | h_gps (const NavState &X, OptionalJacobian< 3, 9 > H={}) |
| GPS measurement model: returns position and its Jacobian. More... | |
| int | main () |
Detailed Description
InvariantEKF on NavState (SE_2(3)) with IMU (predict) and GPS (update)
- Date
- April 25, 2025
Definition in file IEKF_NavstateExample.cpp.
Function Documentation
◆ dynamics()
| Vector9 dynamics | ( | const Vector6 & | imu | ) |
Left-invariant dynamics for NavState.
- Parameters
-
imu 6×1 vector [a; ω]: linear acceleration and angular velocity.
- Returns
- 9×1 tangent: [ω; 0₃; a].
Definition at line 35 of file IEKF_NavstateExample.cpp.
◆ h_gps()
| Vector3 h_gps | ( | const NavState & | X, |
| OptionalJacobian< 3, 9 > | H = {} |
||
| ) |
GPS measurement model: returns position and its Jacobian.
- Parameters
-
X Current state. H Optional 3×9 Jacobian w.r.t. X.
- Returns
- 3×1 position vector.
Definition at line 49 of file IEKF_NavstateExample.cpp.
◆ main()
| int main | ( | ) |
Definition at line 53 of file IEKF_NavstateExample.cpp.