The most common 5DOF 3D->2D calibration + Stereo baseline. More...
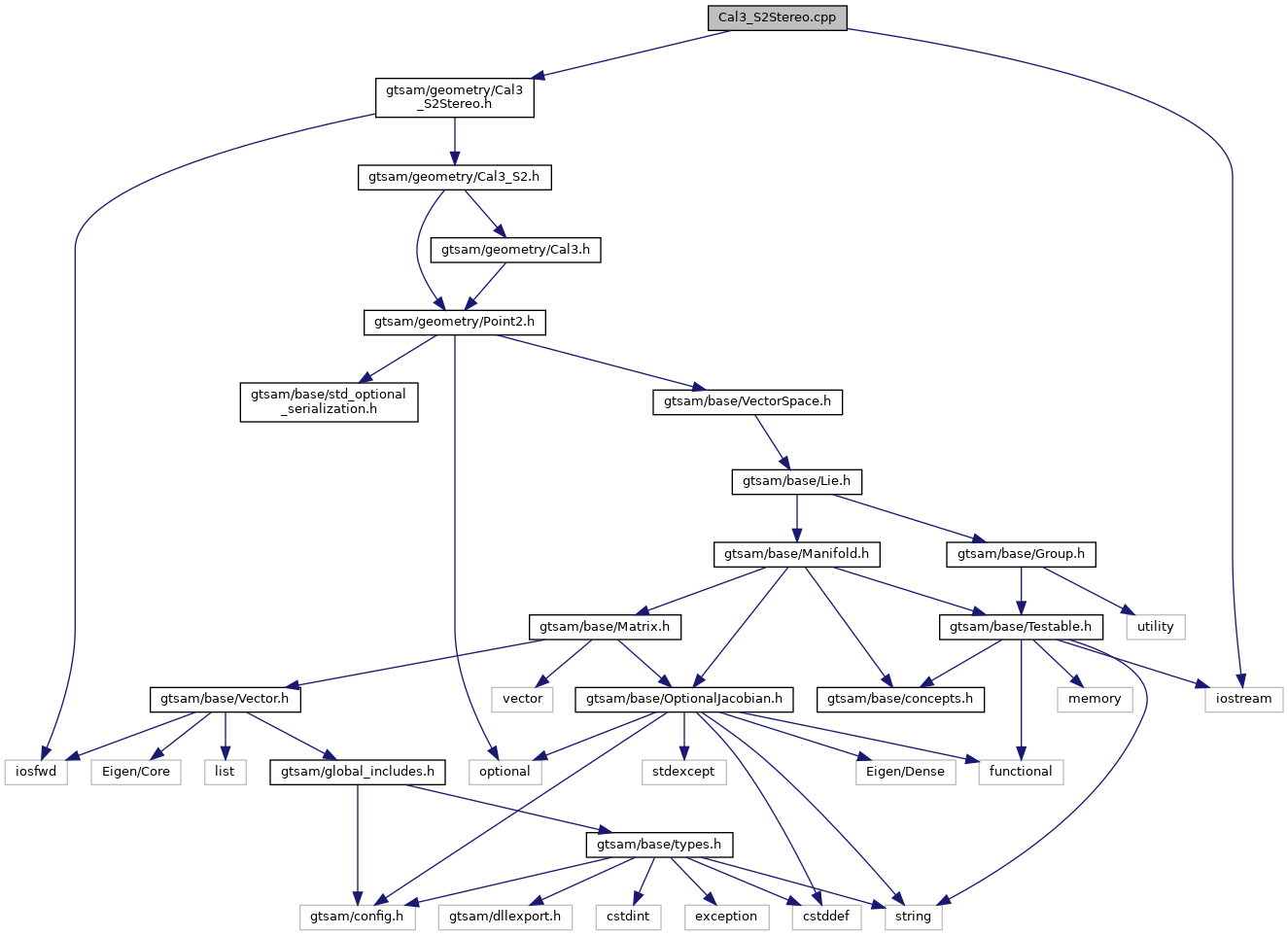
Include dependency graph for Cal3_S2Stereo.cpp:
Go to the source code of this file.
Namespaces | |
| gtsam | |
| traits | |
Functions | |
| std::ostream & | gtsam::operator<< (std::ostream &os, const Cal3_S2Stereo &cal) |
Detailed Description
The most common 5DOF 3D->2D calibration + Stereo baseline.
Definition in file Cal3_S2Stereo.cpp.