#include <BoundingConstraint.h>
Public Types | |
| typedef NonlinearInequalityConstraint | Base |
| typedef std::shared_ptr< BoundingConstraint1< VALUE > > | shared_ptr |
| typedef VALUE | X |
 Public Types inherited from gtsam::NonlinearInequalityConstraint Public Types inherited from gtsam::NonlinearInequalityConstraint | |
| typedef NonlinearConstraint | Base |
| typedef NonlinearFactor | Base |
| typedef std::shared_ptr< This > | shared_ptr |
| typedef NonlinearInequalityConstraint | This |
| Public Types inherited from gtsam::NonlinearConstraint | |
| typedef NoiseModelFactor | Base |
| typedef NonlinearFactor | Base |
| Public Types inherited from gtsam::NoiseModelFactor | |
| typedef std::shared_ptr< This > | shared_ptr |
| Public Types inherited from gtsam::NonlinearFactor | |
| typedef std::shared_ptr< This > | shared_ptr |
| Public Types inherited from gtsam::Factor | |
| typedef KeyVector::const_iterator | const_iterator |
| Const iterator over keys. More... | |
| typedef KeyVector::iterator | iterator |
| Iterator over keys. More... | |
Public Member Functions | |
| BoundingConstraint1 (Key key, double threshold, bool isGreaterThan, double mu=1000.0) | |
| flag for greater/less than More... | |
| Vector | evaluateError (const X &x, OptionalMatrixType H={}) const |
| TODO: This should be deprecated. More... | |
| bool | isGreaterThan () const |
| Key | key () const |
| double | threshold () const |
| Vector | unwhitenedExpr (const Values &x, OptionalMatrixVecType H={}) const override |
| virtual double | value (const X &x, OptionalMatrixType H=OptionalNone) const =0 |
| ~BoundingConstraint1 () override | |
| Public Member Functions inherited from gtsam::NonlinearInequalityConstraint | |
| virtual bool | active (const Values &x) const override |
| virtual NonlinearEqualityConstraint::shared_ptr | createEqualityConstraint () const |
| virtual NoiseModelFactor::shared_ptr | penaltyFactorCustom (InequalityPenaltyFunction::shared_ptr func, const double mu=1.0) const |
| virtual NoiseModelFactor::shared_ptr | penaltyFactorEquality (const double mu=1.0) const |
| virtual Vector | unwhitenedError (const Values &x, OptionalMatrixVecType H=nullptr) const override |
| virtual Vector | whitenedExpr (const Values &x) const |
| virtual | ~NonlinearInequalityConstraint () |
| Public Member Functions inherited from gtsam::NonlinearConstraint | |
| double | error (const HybridValues &c) const override |
| virtual double | error (const Values &c) const |
| virtual bool | feasible (const Values &x, const double tolerance=1e-5) const |
| virtual NoiseModelFactor::shared_ptr | penaltyFactor (const double mu=1.0) const |
| const Vector | sigmas () const |
| virtual std::vector< Matrix > | unwhitenedHessian (const Values &x) const |
| virtual double | violation (const Values &x) const |
| virtual | ~NonlinearConstraint () |
| Public Member Functions inherited from gtsam::NoiseModelFactor | |
| shared_ptr | cloneWithNewNoiseModel (const SharedNoiseModel newNoise) const |
| size_t | dim () const override |
| bool | equals (const NonlinearFactor &f, double tol=1e-9) const override |
| double | error (const HybridValues &c) const override |
| virtual double | error (const Values &c) const |
| double | error (const Values &c) const override |
| std::shared_ptr< GaussianFactor > | linearize (const Values &x) const override |
| const SharedNoiseModel & | noiseModel () const |
| access to the noise model More... | |
| NoiseModelFactor () | |
| template<typename CONTAINER > | |
| NoiseModelFactor (const SharedNoiseModel &noiseModel, const CONTAINER &keys) | |
| void | print (const std::string &s="", const KeyFormatter &keyFormatter=DefaultKeyFormatter) const override |
| Vector | unweightedWhitenedError (const Values &c) const |
| Vector | unwhitenedError (const Values &x, std::vector< Matrix > &H) const |
| double | weight (const Values &c) const |
| Vector | whitenedError (const Values &c) const |
| ~NoiseModelFactor () override | |
| Public Member Functions inherited from gtsam::NonlinearFactor | |
| NonlinearFactor () | |
| template<typename CONTAINER > | |
| NonlinearFactor (const CONTAINER &keys) | |
| double | error (const HybridValues &c) const override |
| virtual shared_ptr | clone () const |
| virtual shared_ptr | rekey (const std::map< Key, Key > &rekey_mapping) const |
| virtual shared_ptr | rekey (const KeyVector &new_keys) const |
| virtual bool | sendable () const |
| Public Member Functions inherited from gtsam::Factor | |
| virtual | ~Factor ()=default |
| Default destructor. More... | |
| bool | empty () const |
| Whether the factor is empty (involves zero variables). More... | |
| Key | front () const |
| First key. More... | |
| Key | back () const |
| Last key. More... | |
| const_iterator | find (Key key) const |
| find More... | |
| const KeyVector & | keys () const |
| Access the factor's involved variable keys. More... | |
| const_iterator | begin () const |
| const_iterator | end () const |
| size_t | size () const |
| virtual void | printKeys (const std::string &s="Factor", const KeyFormatter &formatter=DefaultKeyFormatter) const |
| print only keys More... | |
| bool | equals (const This &other, double tol=1e-9) const |
| check equality More... | |
| KeyVector & | keys () |
| iterator | begin () |
| iterator | end () |
Public Attributes | |
| bool | isGreaterThan_ |
| double | threshold_ |
Additional Inherited Members | |
| Protected Types inherited from gtsam::NoiseModelFactor | |
| typedef NonlinearFactor | Base |
| typedef NoiseModelFactor | This |
| Protected Types inherited from gtsam::NonlinearFactor | |
| typedef Factor | Base |
| typedef NonlinearFactor | This |
| Protected Member Functions inherited from gtsam::NonlinearConstraint | |
| SharedDiagonal | penaltyNoise (const double mu) const |
| Protected Member Functions inherited from gtsam::NoiseModelFactor | |
| NoiseModelFactor (const SharedNoiseModel &noiseModel) | |
| Protected Member Functions inherited from gtsam::Factor | |
| Factor () | |
| template<typename CONTAINER > | |
| Factor (const CONTAINER &keys) | |
| template<typename ITERATOR > | |
| Factor (ITERATOR first, ITERATOR last) | |
| Static Protected Member Functions inherited from gtsam::NonlinearConstraint | |
| static SharedNoiseModel | constrainedNoise (const Vector &sigmas) |
| Static Protected Member Functions inherited from gtsam::Factor | |
| template<typename CONTAINER > | |
| static Factor | FromKeys (const CONTAINER &keys) |
| template<typename ITERATOR > | |
| static Factor | FromIterators (ITERATOR first, ITERATOR last) |
| Protected Attributes inherited from gtsam::NoiseModelFactor | |
| SharedNoiseModel | noiseModel_ |
| Protected Attributes inherited from gtsam::Factor | |
| KeyVector | keys_ |
| The keys involved in this factor. More... | |
Detailed Description
template<class VALUE>
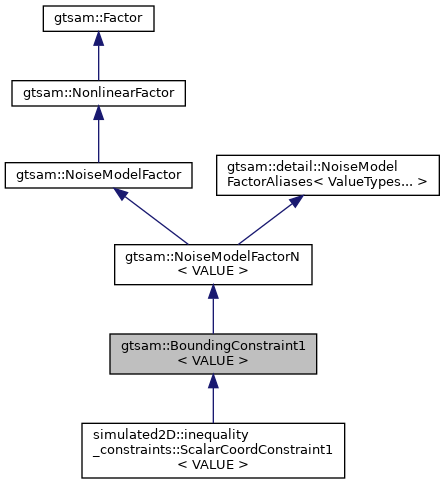
struct gtsam::BoundingConstraint1< VALUE >
Unary inequality constraint forcing a scalar to be greater/less than a fixed threshold. The function will need to have its value function implemented to return a scalar for comparison.
Definition at line 34 of file BoundingConstraint.h.
Member Typedef Documentation
◆ Base
| typedef NonlinearInequalityConstraint gtsam::BoundingConstraint1< VALUE >::Base |
Definition at line 36 of file BoundingConstraint.h.
◆ shared_ptr
| typedef std::shared_ptr<BoundingConstraint1<VALUE> > gtsam::BoundingConstraint1< VALUE >::shared_ptr |
Definition at line 37 of file BoundingConstraint.h.
◆ X
| typedef VALUE gtsam::BoundingConstraint1< VALUE >::X |
Definition at line 35 of file BoundingConstraint.h.
Constructor & Destructor Documentation
◆ BoundingConstraint1()
|
inline |
flag for greater/less than
Definition at line 42 of file BoundingConstraint.h.
◆ ~BoundingConstraint1()
|
inlineoverride |
Definition at line 48 of file BoundingConstraint.h.
Member Function Documentation
◆ evaluateError()
|
inline |
TODO: This should be deprecated.
Definition at line 78 of file BoundingConstraint.h.
◆ isGreaterThan()
|
inline |
Definition at line 51 of file BoundingConstraint.h.
◆ key()
|
inline |
Definition at line 52 of file BoundingConstraint.h.
◆ threshold()
|
inline |
Definition at line 50 of file BoundingConstraint.h.
◆ unwhitenedExpr()
|
inlineoverridevirtual |
Return g(x).
Implements gtsam::NonlinearInequalityConstraint.
Definition at line 62 of file BoundingConstraint.h.
◆ value()
|
pure virtual |
function producing a scalar value to compare to the threshold Must have optional argument for derivative with 1xN matrix, where N = X::dim()
Implemented in simulated2D::inequality_constraints::ScalarCoordConstraint1< VALUE, IDX >.
Member Data Documentation
◆ isGreaterThan_
| bool gtsam::BoundingConstraint1< VALUE >::isGreaterThan_ |
Definition at line 40 of file BoundingConstraint.h.
◆ threshold_
| double gtsam::BoundingConstraint1< VALUE >::threshold_ |
Definition at line 39 of file BoundingConstraint.h.
The documentation for this struct was generated from the following file: