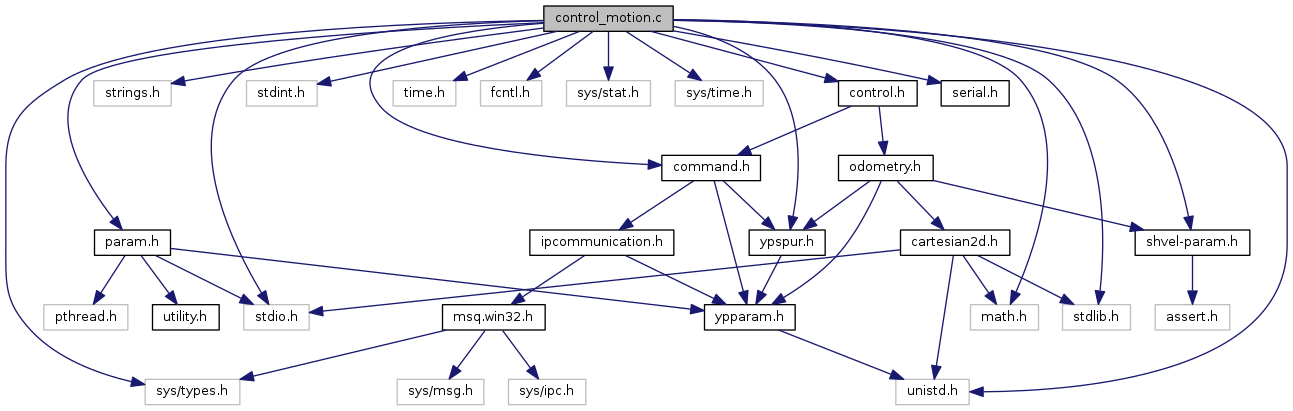
#include <math.h>#include <stdio.h>#include <strings.h>#include <unistd.h>#include <stdint.h>#include <stdlib.h>#include <time.h>#include <fcntl.h>#include <sys/stat.h>#include <sys/time.h>#include <sys/types.h>#include <shvel-param.h>#include <serial.h>#include <param.h>#include <control.h>#include <command.h>#include <ypspur.h>
Include dependency graph for control_motion.c:
Go to the source code of this file.
Functions | |
| double | circle_follow (OdometryPtr odm, SpurUserParamsPtr spur) |
| double | dist_pos (OdometryPtr odm, SpurUserParamsPtr spur) |
| double | line_follow (OdometryPtr odm, SpurUserParamsPtr spur) |
| double | orient (OdometryPtr odm, SpurUserParamsPtr spur) |
| double | regurator (double d, double q, double r, double v_max, double w_max, SpurUserParamsPtr spur) |
| double | spin (OdometryPtr odm, SpurUserParamsPtr spur) |
| int | stop_line (OdometryPtr odm, SpurUserParamsPtr spur) |
| double | timeoptimal_servo (double err, double vel_max, double vel, double acc) |
| double | timeoptimal_servo2 (double err, double vel_max, double vel, double acc, double vel_end) |
| double | trans_q (double theta) |
Function Documentation
| double circle_follow | ( | OdometryPtr | odm, |
| SpurUserParamsPtr | spur | ||
| ) |
Definition at line 64 of file control_motion.c.
| double dist_pos | ( | OdometryPtr | odm, |
| SpurUserParamsPtr | spur | ||
| ) |
Definition at line 172 of file control_motion.c.
| double line_follow | ( | OdometryPtr | odm, |
| SpurUserParamsPtr | spur | ||
| ) |
Definition at line 90 of file control_motion.c.
| double orient | ( | OdometryPtr | odm, |
| SpurUserParamsPtr | spur | ||
| ) |
Definition at line 153 of file control_motion.c.
| double regurator | ( | double | d, |
| double | q, | ||
| double | r, | ||
| double | v_max, | ||
| double | w_max, | ||
| SpurUserParamsPtr | spur | ||
| ) |
Definition at line 103 of file control_motion.c.
| double spin | ( | OdometryPtr | odm, |
| SpurUserParamsPtr | spur | ||
| ) |
Definition at line 134 of file control_motion.c.
| int stop_line | ( | OdometryPtr | odm, |
| SpurUserParamsPtr | spur | ||
| ) |
Definition at line 181 of file control_motion.c.
| double timeoptimal_servo | ( | double | err, |
| double | vel_max, | ||
| double | vel, | ||
| double | acc | ||
| ) |
Definition at line 224 of file control_motion.c.
| double timeoptimal_servo2 | ( | double | err, |
| double | vel_max, | ||
| double | vel, | ||
| double | acc, | ||
| double | vel_end | ||
| ) |
Definition at line 253 of file control_motion.c.
| double trans_q | ( | double | theta | ) |
Definition at line 54 of file control_motion.c.