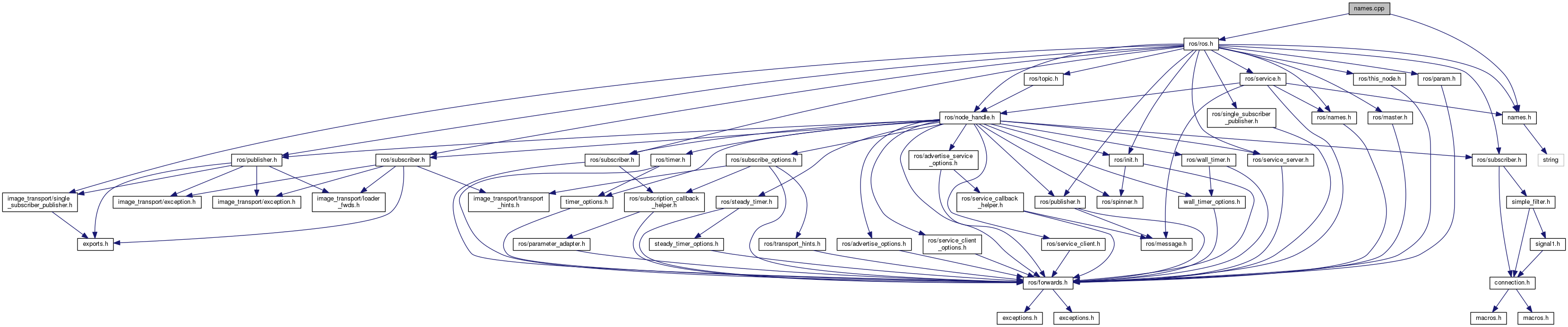
Include dependency graph for names.cpp:
Go to the source code of this file.
Namespaces | |
| visp_hand2eye_calibration | |
Functions | |
| std::string | visp_hand2eye_calibration::camera_object_topic ("camera_object") |
| std::string | visp_hand2eye_calibration::compute_effector_camera_quick_service ("compute_effector_camera_quick") |
| std::string | visp_hand2eye_calibration::compute_effector_camera_service ("compute_effector_camera") |
| std::string | visp_hand2eye_calibration::node_prefix ("/") |
| void | visp_hand2eye_calibration::remap () |
| std::string | visp_hand2eye_calibration::reset_service ("reset") |
| std::string | visp_hand2eye_calibration::world_effector_topic ("world_effector") |