#include <foot_grid_map_model.h>
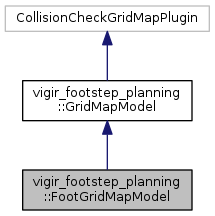
Inheritance diagram for vigir_footstep_planning::FootGridMapModel:
Public Member Functions | |
| FootGridMapModel (const std::string &name="foot_grid_map_model") | |
| bool | initialize (const vigir_generic_params::ParameterSet ¶ms=vigir_generic_params::ParameterSet()) override |
| bool | isAccessible (const State &s) const override |
 Public Member Functions inherited from vigir_footstep_planning::GridMapModel Public Member Functions inherited from vigir_footstep_planning::GridMapModel | |
| GridMapModel (const std::string &name) | |
| bool | loadParams (const vigir_generic_params::ParameterSet ¶ms=vigir_generic_params::ParameterSet()) override |
Protected Attributes | |
| geometry_msgs::Vector3 | foot_size |
| Protected Attributes inherited from vigir_footstep_planning::GridMapModel | |
| int | collision_check_accuracy |
| vigir_gridmap_2d::GridMap2D | distance_map |
Additional Inherited Members | |
| Protected Member Functions inherited from vigir_footstep_planning::GridMapModel | |
| bool | collision_check (double x, double y, double cos_theta, double sin_theta, double height, double width) const |
| Checks if a footstep (represented by its center and orientation) collides with an obstacle. The check is done by recursively testing if either the circumcircle of the foot, the inner circle of the foot or the area in between has an appropriate distance to the nearest obstacle. More... | |
| void | mapCallback (const nav_msgs::OccupancyGridConstPtr &occupancy_grid_map_) |
Detailed Description
Definition at line 40 of file foot_grid_map_model.h.
Constructor & Destructor Documentation
| vigir_footstep_planning::FootGridMapModel::FootGridMapModel | ( | const std::string & | name = "foot_grid_map_model" | ) |
Definition at line 7 of file foot_grid_map_model.cpp.
Member Function Documentation
|
override |
Definition at line 12 of file foot_grid_map_model.cpp.
|
override |
Definition at line 23 of file foot_grid_map_model.cpp.
Member Data Documentation
|
protected |
Definition at line 52 of file foot_grid_map_model.h.
The documentation for this class was generated from the following files: