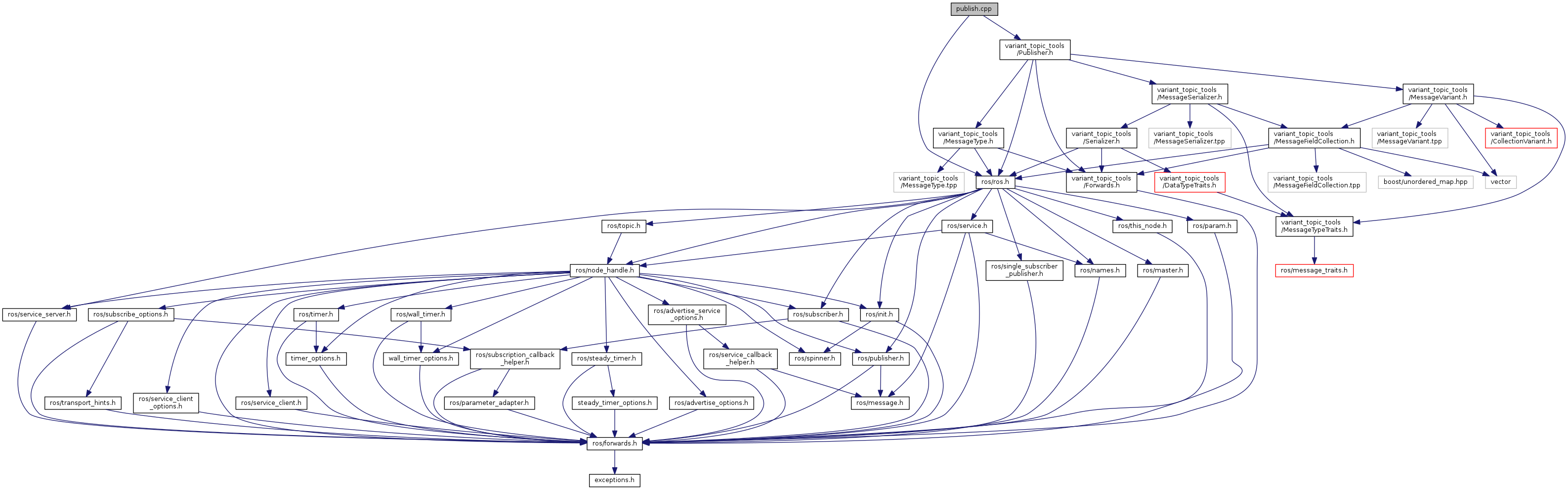
Include dependency graph for publish.cpp:
Go to the source code of this file.
Functions | |
| bool | getTopicBase (const std::string &topic, std::string &topicBase) |
| int | main (int argc, char **argv) |
| void | publish (const ros::TimerEvent &event) |
| void | publishOnce () |
Variables | |
| variant_topic_tools::MessageDefinition | messageDefinition |
| variant_topic_tools::MessageType | messageType |
| ros::NodeHandlePtr | nodeHandle |
| variant_topic_tools::Publisher | publisher |
| size_t | publisherQueueSize = 100 |
| double | publisherRate = 0.0 |
| ros::Timer | publisherTimer |
| std::string | publisherTopic |
| std::string | publisherType |
Function Documentation
| bool getTopicBase | ( | const std::string & | topic, |
| std::string & | topicBase | ||
| ) |
Definition at line 35 of file publish.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 76 of file publish.cpp.
| void publish | ( | const ros::TimerEvent & | event | ) |
Definition at line 72 of file publish.cpp.
| void publishOnce | ( | ) |
Definition at line 55 of file publish.cpp.
Variable Documentation
| variant_topic_tools::MessageDefinition messageDefinition |
Definition at line 32 of file publish.cpp.
| variant_topic_tools::MessageType messageType |
Definition at line 33 of file publish.cpp.
| ros::NodeHandlePtr nodeHandle |
Definition at line 23 of file publish.cpp.
| variant_topic_tools::Publisher publisher |
Definition at line 25 of file publish.cpp.
| size_t publisherQueueSize = 100 |
Definition at line 29 of file publish.cpp.
| double publisherRate = 0.0 |
Definition at line 28 of file publish.cpp.
| ros::Timer publisherTimer |
Definition at line 30 of file publish.cpp.
| std::string publisherTopic |
Definition at line 26 of file publish.cpp.
| std::string publisherType |
Definition at line 27 of file publish.cpp.