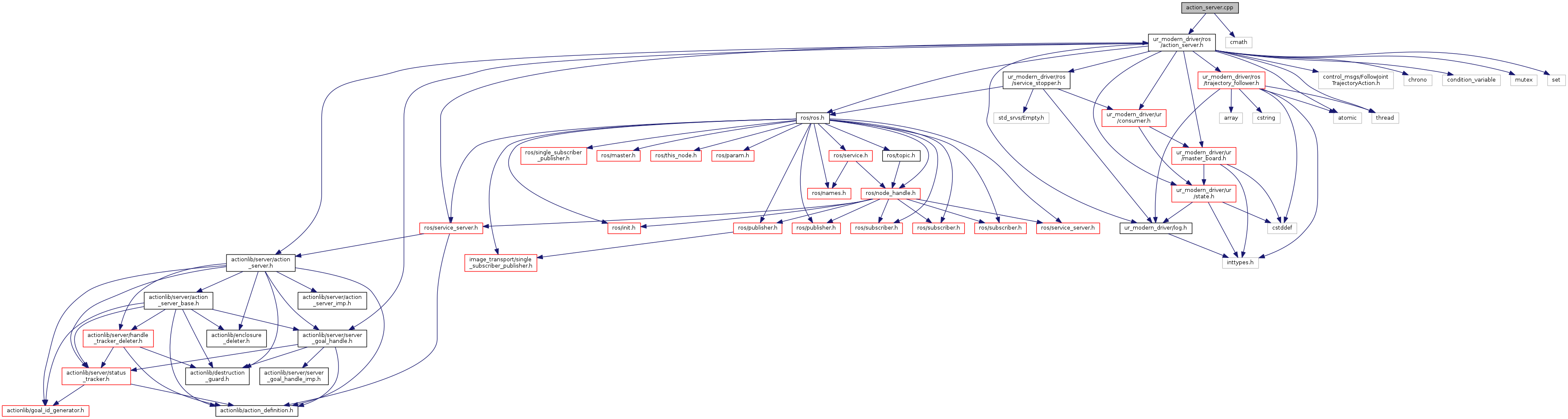
Include dependency graph for action_server.cpp:
Go to the source code of this file.
Functions | |
| std::chrono::microseconds | convert (const ros::Duration &dur) |
Function Documentation
|
inline |
Definition at line 232 of file action_server.cpp.
Go to the source code of this file.
Functions | |
| std::chrono::microseconds | convert (const ros::Duration &dur) |
|
inline |
Definition at line 232 of file action_server.cpp.