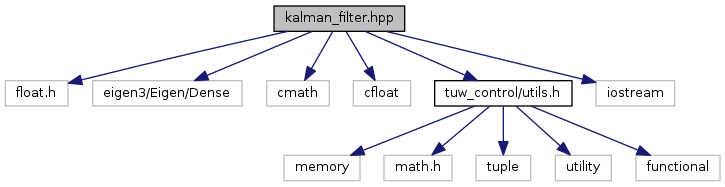
#include <float.h>#include <eigen3/Eigen/Dense>#include <cmath>#include <cfloat>#include <tuw_control/utils.h>#include <iostream>
Include dependency graph for kalman_filter.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | tuw::KalmanFilter< NumType, XDim > |
| Minimal cass implementing the Extended Kalman Filter algorithm. More... | |
| class | tuw::KalmanFilterInterface< KFPredType, KFUpdateType > |
| Interface for simplified manipulation of specialized (Extended) Kalman Filter implementations. More... | |
| class | tuw::KalmanFilterPredictInterface< NumType, XDim, UDim, ParamType > |
| Interface for simplified manipulation of specialized (Extended) Kalman Filter prediction part. More... | |
| class | tuw::KalmanFilterUpdateInterface< KFPredType, HDim > |
| Interface for simplified manipulation of specialized (Extended) Kalman Filter updates. To be used with KalmanFilterPredictInterface. More... | |
Namespaces | |
| tuw | |