#include <iostream>#include <fstream>#include <sstream>#include <GL/gl.h>#include <GL/glut.h>#include <opencv2/highgui/highgui.hpp>#include <opencv2/imgproc/imgproc.hpp>#include "aruco.h"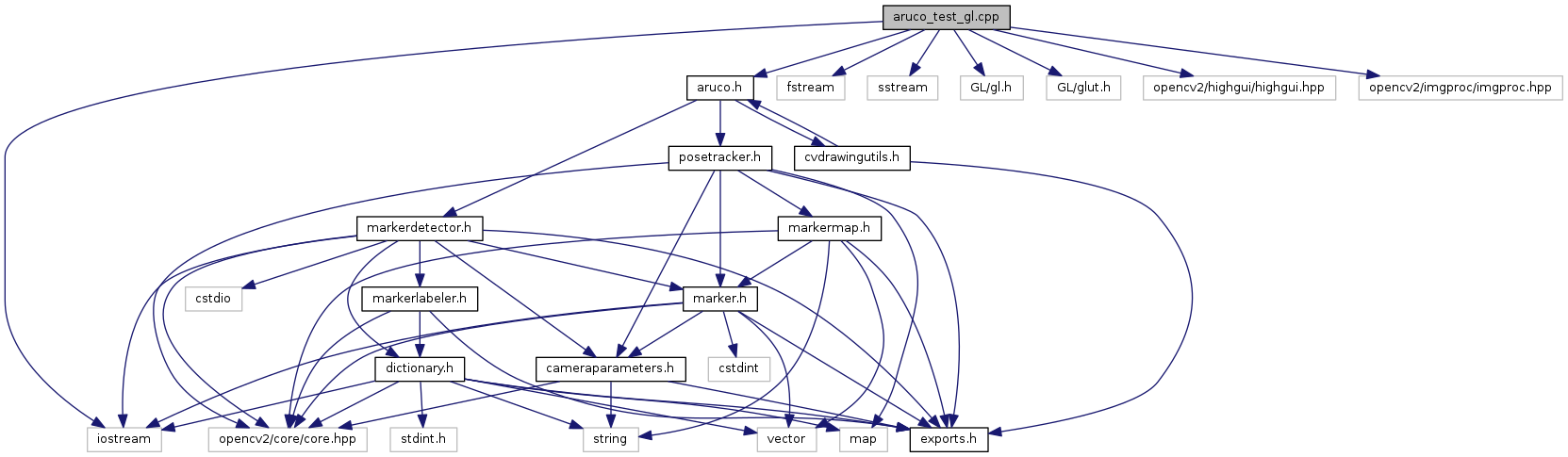
Go to the source code of this file.
Functions | |
| void | axis (float size) |
| int | main (int argc, char **argv) |
| bool | readArguments (int argc, char **argv) |
| bool | readIntrinsicFile (string TheIntrinsicFile, Mat &TheIntriscCameraMatrix, Mat &TheDistorsionCameraParams, Size size) |
| void | vDrawScene () |
| void | vIdle () |
| void | vMouse (int b, int s, int x, int y) |
| void | vResize (GLsizei iWidth, GLsizei iHeight) |
Variables | |
| MarkerDetector | PPDetector |
| bool | The3DInfoAvailable =false |
| CameraParameters | TheCameraParams |
| bool | TheCaptureFlag =true |
| Size | TheGlWindowSize |
| Mat | TheInputImage |
| string | TheInputVideo |
| string | TheIntrinsicFile |
| vector< Marker > | TheMarkers |
| float | TheMarkerSize =-1 |
| Mat | TheResizedImage |
| Mat | TheUndInputImage |
| VideoCapture | TheVideoCapturer |
Function Documentation
| void axis | ( | float | size | ) |
Definition at line 155 of file aruco_test_gl.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 91 of file aruco_test_gl.cpp.
| bool readArguments | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 70 of file aruco_test_gl.cpp.
| bool readIntrinsicFile | ( | string | TheIntrinsicFile, |
| Mat & | TheIntriscCameraMatrix, | ||
| Mat & | TheDistorsionCameraParams, | ||
| Size | size | ||
| ) |
This function reads the matrix intrinsics and the distorsion coefficients from a file. The format of the file is
- Parameters
-
TheIntrinsicFile path to the file with the info TheIntriscCameraMatrix output matrix with the intrinsics TheDistorsionCameraParams output vector with distorsion params size of the images captured. Note that the images you are using might be different from these employed for calibration (which are in the file). If so, the intrinsic must be adapted properly. That is why you must pass here the size of the images you are employing
- Returns
- true if params are readed properly
| void vDrawScene | ( | ) |
clear
draw image in the buffer
Set the appropriate projection matrix so that rendering is done in a enrvironment
Definition at line 184 of file aruco_test_gl.cpp.
| void vIdle | ( | ) |
Definition at line 240 of file aruco_test_gl.cpp.
| void vMouse | ( | int | b, |
| int | s, | ||
| int | x, | ||
| int | y | ||
| ) |
Definition at line 141 of file aruco_test_gl.cpp.
| void vResize | ( | GLsizei | iWidth, |
| GLsizei | iHeight | ||
| ) |
Definition at line 266 of file aruco_test_gl.cpp.
Variable Documentation
| MarkerDetector PPDetector |
Definition at line 48 of file aruco_test_gl.cpp.
| bool The3DInfoAvailable =false |
Definition at line 46 of file aruco_test_gl.cpp.
| CameraParameters TheCameraParams |
Definition at line 52 of file aruco_test_gl.cpp.
| bool TheCaptureFlag =true |
Definition at line 54 of file aruco_test_gl.cpp.
| Size TheGlWindowSize |
Definition at line 53 of file aruco_test_gl.cpp.
| Mat TheInputImage |
Definition at line 51 of file aruco_test_gl.cpp.
| string TheInputVideo |
Definition at line 44 of file aruco_test_gl.cpp.
| string TheIntrinsicFile |
Definition at line 45 of file aruco_test_gl.cpp.
| vector<Marker> TheMarkers |
Definition at line 50 of file aruco_test_gl.cpp.
| float TheMarkerSize =-1 |
Definition at line 47 of file aruco_test_gl.cpp.
| Mat TheResizedImage |
Definition at line 51 of file aruco_test_gl.cpp.
| Mat TheUndInputImage |
Definition at line 51 of file aruco_test_gl.cpp.
| VideoCapture TheVideoCapturer |
Definition at line 49 of file aruco_test_gl.cpp.