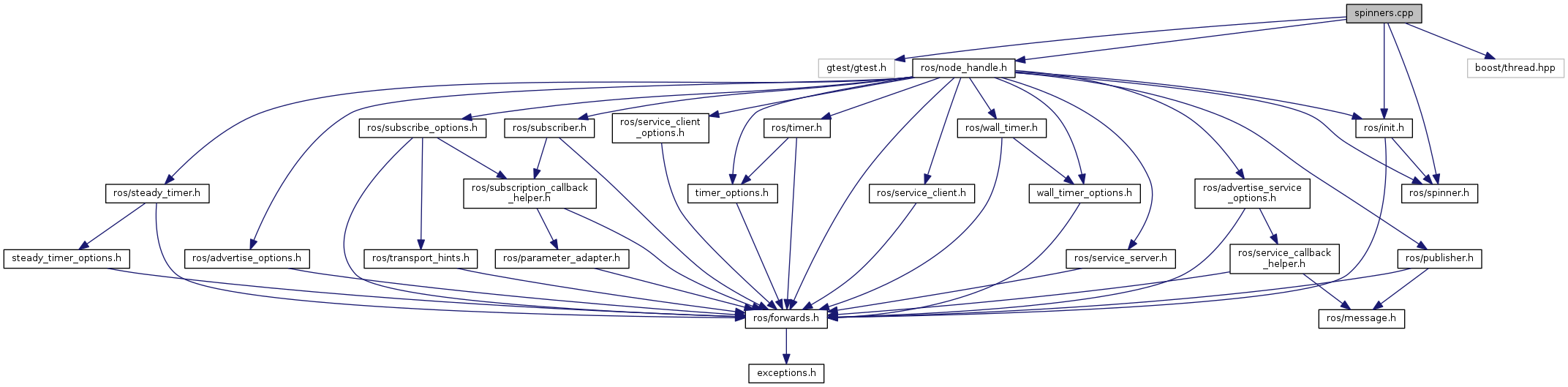
#include <gtest/gtest.h>#include "ros/spinner.h"#include "ros/init.h"#include "ros/node_handle.h"#include <boost/thread.hpp>
Include dependency graph for spinners.cpp:
Go to the source code of this file.
Macros | |
| #define | DOIT() |
Functions | |
| void | fire_shutdown (const ros::WallTimerEvent &) |
| int | main (int argc, char **argv) |
| TEST (Spinners, spin) | |
| TEST (Spinners, spinfail) | |
| TEST (Spinners, singlefail) | |
| TEST (Spinners, multi) | |
| TEST (Spinners, multifail) | |
| TEST (Spinners, async) | |
Variables | |
| int | argc_ |
| char ** | argv_ |
Macro Definition Documentation
| #define DOIT | ( | ) |
Value:
NodeHandle nh; \
ros::WallTimer t = nh.createWallTimer(ros::WallDuration(2.0), \
&fire_shutdown); \
ROSCPP_DECL void init(int &argc, char **argv, const std::string &name, uint32_t options=0)
Definition at line 61 of file spinners.cpp.
Function Documentation
| void fire_shutdown | ( | const ros::WallTimerEvent & | ) |
Definition at line 56 of file spinners.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 165 of file spinners.cpp.
| TEST | ( | Spinners | , |
| spin | |||
| ) |
Definition at line 67 of file spinners.cpp.
| TEST | ( | Spinners | , |
| spinfail | |||
| ) |
Definition at line 73 of file spinners.cpp.
| TEST | ( | Spinners | , |
| singlefail | |||
| ) |
Definition at line 95 of file spinners.cpp.
| TEST | ( | Spinners | , |
| multi | |||
| ) |
Definition at line 118 of file spinners.cpp.
| TEST | ( | Spinners | , |
| multifail | |||
| ) |
Definition at line 125 of file spinners.cpp.
| TEST | ( | Spinners | , |
| async | |||
| ) |
Definition at line 141 of file spinners.cpp.
Variable Documentation
| int argc_ |
Definition at line 53 of file spinners.cpp.
| char** argv_ |
Definition at line 54 of file spinners.cpp.