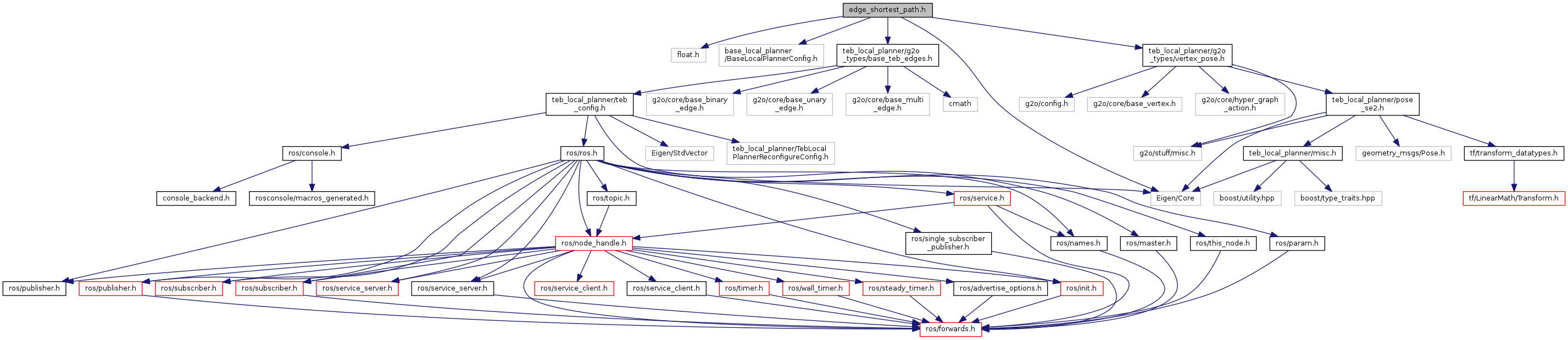
#include <float.h>#include <base_local_planner/BaseLocalPlannerConfig.h>#include <teb_local_planner/g2o_types/base_teb_edges.h>#include <teb_local_planner/g2o_types/vertex_pose.h>#include <Eigen/Core>
Include dependency graph for edge_shortest_path.h:
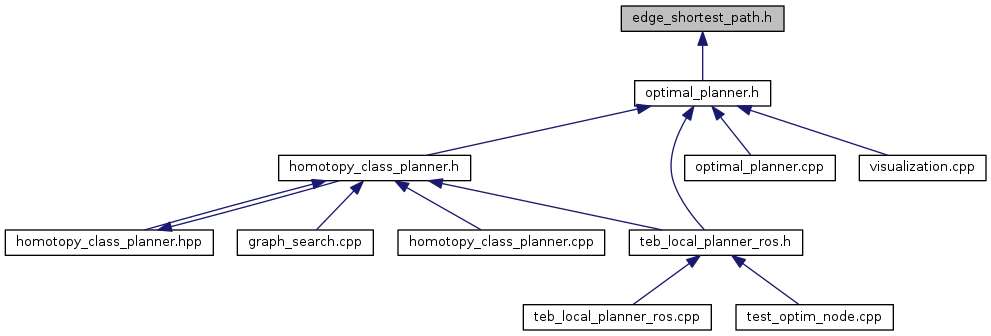
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | teb_local_planner::EdgeShortestPath |
| Edge defining the cost function for minimizing the Euclidean distance between two consectuive poses. More... | |
Namespaces | |
| teb_local_planner | |