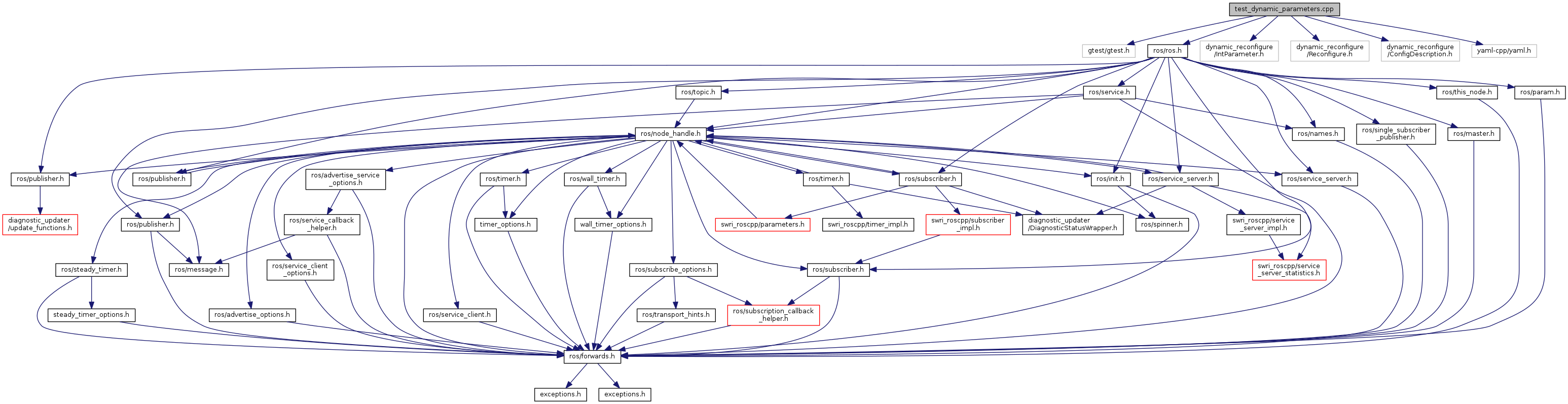
#include <gtest/gtest.h>#include <ros/ros.h>#include <dynamic_reconfigure/IntParameter.h>#include <dynamic_reconfigure/Reconfigure.h>#include <dynamic_reconfigure/ConfigDescription.h>#include <yaml-cpp/yaml.h>
Include dependency graph for test_dynamic_parameters.cpp:
Go to the source code of this file.
Functions | |
| void | checkValues (const dynamic_reconfigure::ReconfigureResponse &srv_resp, int int_value, double double_value, std::string string_value, bool bool_value) |
| int | main (int argc, char **argv) |
| TEST (DynamicParameters, testGetAndSetParams) | |
| TEST (DynamicParameters, testParamDescriptions) | |
Function Documentation
| void checkValues | ( | const dynamic_reconfigure::ReconfigureResponse & | srv_resp, |
| int | int_value, | ||
| double | double_value, | ||
| std::string | string_value, | ||
| bool | bool_value | ||
| ) |
Convenience function for checking that several values in a reconfigure response are what we expect
Definition at line 44 of file test_dynamic_parameters.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 204 of file test_dynamic_parameters.cpp.
| TEST | ( | DynamicParameters | , |
| testGetAndSetParams | |||
| ) |
This test will: 1) Verify that the test node's service is advertised 2) Check that the default values for its parameters are all 0 / empty 3) Set all of their values through the service 4) Verify that the values are set as expected
Definition at line 108 of file test_dynamic_parameters.cpp.
| TEST | ( | DynamicParameters | , |
| testParamDescriptions | |||
| ) |
Test that the parameter descriptions are being published as expected.
Definition at line 139 of file test_dynamic_parameters.cpp.