This file is used to parse received EKF compued data binary logs. More...
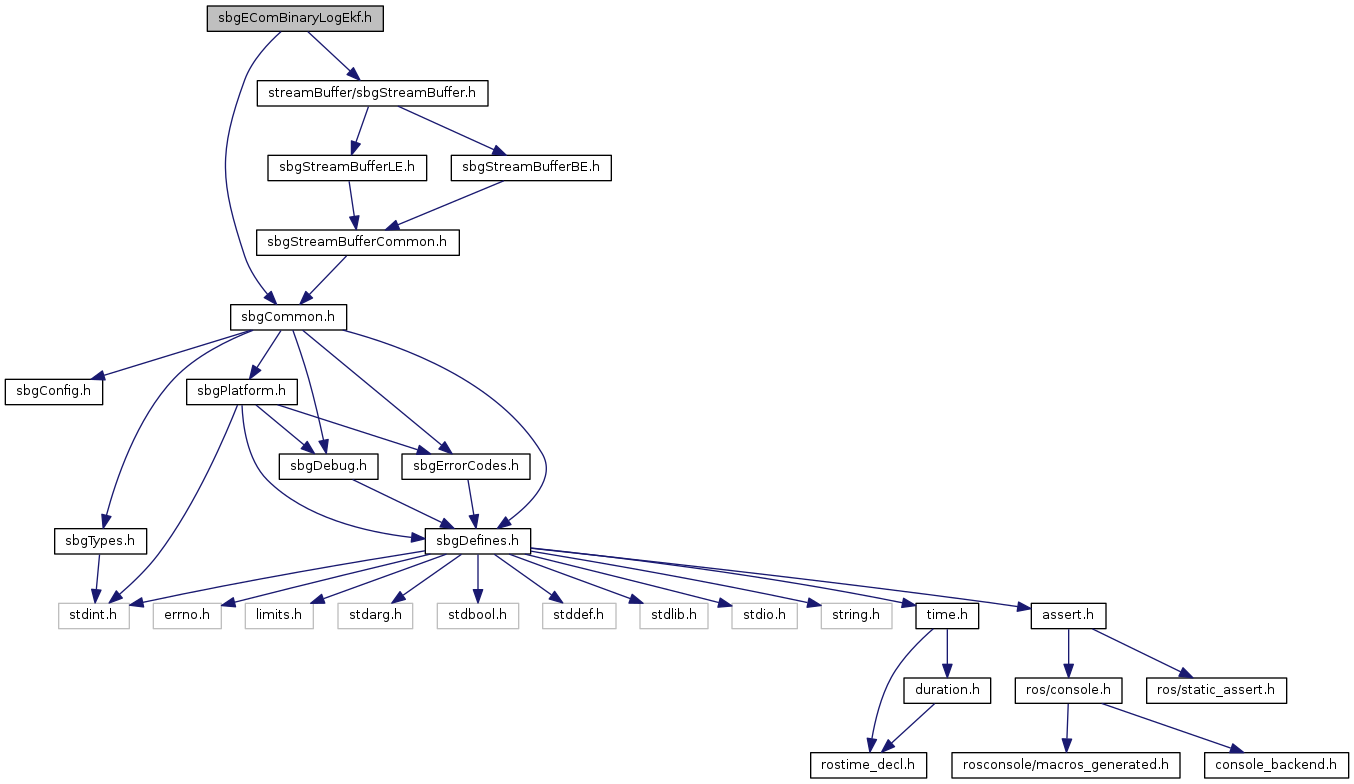

Go to the source code of this file.
Classes | |
| struct | _SbgLogEkfEulerData |
| struct | _SbgLogEkfNavData |
| struct | _SbgLogEkfQuatData |
Macros | |
| #define | SBG_ECOM_SOL_AIR_DATA_USED (0x00000001u << 25) |
| #define | SBG_ECOM_SOL_ALIGN_VALID (0x00000001u << 27) |
| #define | SBG_ECOM_SOL_ATTITUDE_VALID (0x00000001u << 4) |
| #define | SBG_ECOM_SOL_DEPTH_USED (0x00000001u << 28) |
| #define | SBG_ECOM_SOL_DVL_BT_USED (0x00000001u << 19) |
| #define | SBG_ECOM_SOL_DVL_WT_USED (0x00000001u << 20) |
| #define | SBG_ECOM_SOL_GPS1_HDT_USED (0x00000001u << 13) |
| #define | SBG_ECOM_SOL_GPS1_POS_USED (0x00000001u << 11) |
| #define | SBG_ECOM_SOL_GPS1_VEL_USED (0x00000001u << 10) |
| #define | SBG_ECOM_SOL_GPS2_HDT_USED (0x00000001u << 17) |
| #define | SBG_ECOM_SOL_GPS2_POS_USED (0x00000001u << 15) |
| #define | SBG_ECOM_SOL_GPS2_VEL_USED (0x00000001u << 14) |
| #define | SBG_ECOM_SOL_HEADING_VALID (0x00000001u << 5) |
| #define | SBG_ECOM_SOL_MAG_REF_USED (0x00000001u << 9) |
| #define | SBG_ECOM_SOL_ODO_USED (0x00000001u << 18) |
| #define | SBG_ECOM_SOL_POSITION_VALID (0x00000001u << 7) |
| #define | SBG_ECOM_SOL_USBL_USED (0x00000001u << 24) |
| #define | SBG_ECOM_SOL_USER_HEADING_USED (0x00000001u << 23) |
| #define | SBG_ECOM_SOL_USER_POS_USED (0x00000001u << 21) |
| #define | SBG_ECOM_SOL_USER_VEL_USED (0x00000001u << 22) |
| #define | SBG_ECOM_SOL_VELOCITY_VALID (0x00000001u << 6) |
| #define | SBG_ECOM_SOL_VERT_REF_USED (0x00000001u << 8) |
| #define | SBG_ECOM_SOL_ZUPT_USED (0x00000001u << 26) |
| #define | SBG_ECOM_SOLUTION_MODE_MASK (0x0000000Fu) |
| #define | SBG_ECOM_SOLUTION_MODE_SHIFT (0u) |
Typedefs | |
| typedef enum _SbgEComSolutionMode | SbgEComSolutionMode |
| typedef struct _SbgLogEkfEulerData | SbgLogEkfEulerData |
| typedef struct _SbgLogEkfNavData | SbgLogEkfNavData |
| typedef struct _SbgLogEkfQuatData | SbgLogEkfQuatData |
Enumerations | |
| enum | _SbgEComSolutionMode { SBG_ECOM_SOL_MODE_UNINITIALIZED = 0, SBG_ECOM_SOL_MODE_VERTICAL_GYRO = 1, SBG_ECOM_SOL_MODE_AHRS = 2, SBG_ECOM_SOL_MODE_NAV_VELOCITY = 3, SBG_ECOM_SOL_MODE_NAV_POSITION = 4 } |
Functions | |
| SbgErrorCode | sbgEComBinaryLogParseEkfEulerData (SbgStreamBuffer *pInputStream, SbgLogEkfEulerData *pOutputData) |
| SbgErrorCode | sbgEComBinaryLogParseEkfNavData (SbgStreamBuffer *pInputStream, SbgLogEkfNavData *pOutputData) |
| SbgErrorCode | sbgEComBinaryLogParseEkfQuatData (SbgStreamBuffer *pInputStream, SbgLogEkfQuatData *pOutputData) |
| SbgErrorCode | sbgEComBinaryLogWriteEkfEulerData (SbgStreamBuffer *pOutputStream, const SbgLogEkfEulerData *pInputData) |
| SbgErrorCode | sbgEComBinaryLogWriteEkfNavData (SbgStreamBuffer *pOutputStream, const SbgLogEkfNavData *pInputData) |
| SbgErrorCode | sbgEComBinaryLogWriteEkfQuatData (SbgStreamBuffer *pOutputStream, const SbgLogEkfQuatData *pInputData) |
| SBG_INLINE uint32_t | sbgEComLogEkfBuildSolutionStatus (SbgEComSolutionMode solutionMode, uint32_t masks) |
| SBG_INLINE SbgEComSolutionMode | sbgEComLogEkfGetSolutionMode (uint32_t status) |
Detailed Description
This file is used to parse received EKF compued data binary logs.
- Date
- 25 February 2013
Copyright Notice
Copyright (C) 2007-2013, SBG Systems SAS. All rights reserved.
This source code is intended for use only by SBG Systems SAS and those that have explicit written permission to use it from SBG Systems SAS.
THIS CODE AND INFORMATION IS PROVIDED "AS IS" WITHOUT WARRANTY OF ANY KIND, EITHER EXPRESSED OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE IMPLIED WARRANTIES OF MERCHANTABILITY AND/OR FITNESS FOR A PARTICULAR PURPOSE.
Definition in file sbgEComBinaryLogEkf.h.
Macro Definition Documentation
| #define SBG_ECOM_SOL_AIR_DATA_USED (0x00000001u << 25) |
Set to 1 if AirData (altimeter and/or true airspeed) is used in solution (data used and valid since 3s).
Definition at line 58 of file sbgEComBinaryLogEkf.h.
| #define SBG_ECOM_SOL_ALIGN_VALID (0x00000001u << 27) |
Set to 1 if sensor alignment and calibration parameters are valid
Definition at line 60 of file sbgEComBinaryLogEkf.h.
| #define SBG_ECOM_SOL_ATTITUDE_VALID (0x00000001u << 4) |
Solution bit masks definitions.Set to 1 if attitude data is reliable (Roll/Pitch error < 0,5�).
Definition at line 39 of file sbgEComBinaryLogEkf.h.
| #define SBG_ECOM_SOL_DEPTH_USED (0x00000001u << 28) |
Set to 1 if Depth sensor (for subsea navigation) is used in solution (data used and valid since 3s).
Definition at line 61 of file sbgEComBinaryLogEkf.h.
| #define SBG_ECOM_SOL_DVL_BT_USED (0x00000001u << 19) |
Set to 1 if DVL Bottom Tracking is used in solution (data used and valid since 3s).
Definition at line 52 of file sbgEComBinaryLogEkf.h.
| #define SBG_ECOM_SOL_DVL_WT_USED (0x00000001u << 20) |
Set to 1 if DVL Water Tracking is used in solution (data used and valid since 3s).
Definition at line 53 of file sbgEComBinaryLogEkf.h.
| #define SBG_ECOM_SOL_GPS1_HDT_USED (0x00000001u << 13) |
Set to 1 if GPS1 True Heading is used in solution (data used and valid since 3s).
Definition at line 47 of file sbgEComBinaryLogEkf.h.
| #define SBG_ECOM_SOL_GPS1_POS_USED (0x00000001u << 11) |
Set to 1 if GPS1 Position is used in solution (data used and valid since 3s).
Definition at line 46 of file sbgEComBinaryLogEkf.h.
| #define SBG_ECOM_SOL_GPS1_VEL_USED (0x00000001u << 10) |
Set to 1 if GPS1 velocity is used in solution (data used and valid since 3s).
Definition at line 45 of file sbgEComBinaryLogEkf.h.
| #define SBG_ECOM_SOL_GPS2_HDT_USED (0x00000001u << 17) |
Set to 1 if GPS2 True Heading is used in solution (data used and valid since 3s).
Definition at line 50 of file sbgEComBinaryLogEkf.h.
| #define SBG_ECOM_SOL_GPS2_POS_USED (0x00000001u << 15) |
Set to 1 if GPS2 Position is used in solution (data used and valid since 3s).
Definition at line 49 of file sbgEComBinaryLogEkf.h.
| #define SBG_ECOM_SOL_GPS2_VEL_USED (0x00000001u << 14) |
Set to 1 if GPS2 velocity is used in solution (data used and valid since 3s).
Definition at line 48 of file sbgEComBinaryLogEkf.h.
| #define SBG_ECOM_SOL_HEADING_VALID (0x00000001u << 5) |
Set to 1 if geading data is reliable (Heading error < 1�).
Definition at line 40 of file sbgEComBinaryLogEkf.h.
| #define SBG_ECOM_SOL_MAG_REF_USED (0x00000001u << 9) |
Set to 1 if magnetometer is used in solution (data used and valid since 3s).
Definition at line 44 of file sbgEComBinaryLogEkf.h.
| #define SBG_ECOM_SOL_ODO_USED (0x00000001u << 18) |
Set to 1 if Odometer is used in solution (data used and valid since 3s).
Definition at line 51 of file sbgEComBinaryLogEkf.h.
| #define SBG_ECOM_SOL_POSITION_VALID (0x00000001u << 7) |
Set to 1 if position data is reliable (Position error < 10m).
Definition at line 42 of file sbgEComBinaryLogEkf.h.
| #define SBG_ECOM_SOL_USBL_USED (0x00000001u << 24) |
Set to 1 if USBL / LBL is used in solution (data used and valid since 3s).
Definition at line 57 of file sbgEComBinaryLogEkf.h.
| #define SBG_ECOM_SOL_USER_HEADING_USED (0x00000001u << 23) |
Set to 1 if user Course is used in solution (data used and valid since 3s).
Definition at line 56 of file sbgEComBinaryLogEkf.h.
| #define SBG_ECOM_SOL_USER_POS_USED (0x00000001u << 21) |
Set to 1 if user velocity is used in solution (data used and valid since 3s).
Definition at line 54 of file sbgEComBinaryLogEkf.h.
| #define SBG_ECOM_SOL_USER_VEL_USED (0x00000001u << 22) |
Set to 1 if user Position is used in solution (data used and valid since 3s).
Definition at line 55 of file sbgEComBinaryLogEkf.h.
| #define SBG_ECOM_SOL_VELOCITY_VALID (0x00000001u << 6) |
Set to 1 if velocity data is reliable (velocity error < 1.5 m/s).
Definition at line 41 of file sbgEComBinaryLogEkf.h.
| #define SBG_ECOM_SOL_VERT_REF_USED (0x00000001u << 8) |
Set to 1 if vertical reference is used in solution (data used and valid since 3s).
Definition at line 43 of file sbgEComBinaryLogEkf.h.
| #define SBG_ECOM_SOL_ZUPT_USED (0x00000001u << 26) |
Set to 1 if a ZUPT is used in solution (data used and valid since 3s).
Definition at line 59 of file sbgEComBinaryLogEkf.h.
| #define SBG_ECOM_SOLUTION_MODE_MASK (0x0000000Fu) |
Mask used to keep only the clock status part.
Definition at line 34 of file sbgEComBinaryLogEkf.h.
| #define SBG_ECOM_SOLUTION_MODE_SHIFT (0u) |
Solution status mode definitions.Shift used to extract the clock status part.
Definition at line 33 of file sbgEComBinaryLogEkf.h.
Typedef Documentation
| typedef enum _SbgEComSolutionMode SbgEComSolutionMode |
Solution filter mode enum.
| typedef struct _SbgLogEkfEulerData SbgLogEkfEulerData |
EKF computed orientation using euler angles.
| typedef struct _SbgLogEkfNavData SbgLogEkfNavData |
EFK computed navigation data.
| typedef struct _SbgLogEkfQuatData SbgLogEkfQuatData |
EFK computed orientation using quaternion.
Enumeration Type Documentation
| enum _SbgEComSolutionMode |
Solution filter mode enum.
Definition at line 66 of file sbgEComBinaryLogEkf.h.
Function Documentation
| SbgErrorCode sbgEComBinaryLogParseEkfEulerData | ( | SbgStreamBuffer * | pInputStream, |
| SbgLogEkfEulerData * | pOutputData | ||
| ) |
Parse data for the SBG_ECOM_LOG_EKF_EULER message and fill the corresponding structure.
- Parameters
-
[in] pInputStream Input stream buffer to read the payload from. [out] pOutputData Pointer on the output structure that stores parsed data.
- Returns
- SBG_NO_ERROR if the payload has been parsed.
Definition at line 13 of file sbgEComBinaryLogEkf.c.
| SbgErrorCode sbgEComBinaryLogParseEkfNavData | ( | SbgStreamBuffer * | pInputStream, |
| SbgLogEkfNavData * | pOutputData | ||
| ) |
Parse data for the SBG_ECOM_LOG_EKF_NAV message and fill the corresponding structure.
- Parameters
-
[in] pInputStream Input stream buffer to read the payload from. [out] pOutputData Pointer on the output structure that stores parsed data.
- Returns
- SBG_NO_ERROR if the payload has been parsed.
Definition at line 143 of file sbgEComBinaryLogEkf.c.
| SbgErrorCode sbgEComBinaryLogParseEkfQuatData | ( | SbgStreamBuffer * | pInputStream, |
| SbgLogEkfQuatData * | pOutputData | ||
| ) |
Parse data for the SBG_ECOM_LOG_EKF_QUAT message and fill the corresponding structure.
- Parameters
-
[in] pInputStream Input stream buffer to read the payload from. [out] pOutputData Pointer on the output structure that stores parsed data.
- Returns
- SBG_NO_ERROR if the payload has been parsed.
Definition at line 77 of file sbgEComBinaryLogEkf.c.
| SbgErrorCode sbgEComBinaryLogWriteEkfEulerData | ( | SbgStreamBuffer * | pOutputStream, |
| const SbgLogEkfEulerData * | pInputData | ||
| ) |
Write data for the SBG_ECOM_LOG_EKF_EULER message to the output stream buffer from the provided structure.
- Parameters
-
[out] pOutputStream Output stream buffer to write the payload to. [in] pInputData Pointer on the input structure that stores data to write.
- Returns
- SBG_NO_ERROR if the message has been generated in the provided buffer.
Definition at line 45 of file sbgEComBinaryLogEkf.c.
| SbgErrorCode sbgEComBinaryLogWriteEkfNavData | ( | SbgStreamBuffer * | pOutputStream, |
| const SbgLogEkfNavData * | pInputData | ||
| ) |
Write data for the SBG_ECOM_LOG_EKF_NAV message to the output stream buffer from the provided structure.
- Parameters
-
[out] pOutputStream Output stream buffer to write the payload to. [in] pInputData Pointer on the input structure that stores data to write.
- Returns
- SBG_NO_ERROR if the message has been generated in the provided buffer.
Definition at line 185 of file sbgEComBinaryLogEkf.c.
| SbgErrorCode sbgEComBinaryLogWriteEkfQuatData | ( | SbgStreamBuffer * | pOutputStream, |
| const SbgLogEkfQuatData * | pInputData | ||
| ) |
Write data for the SBG_ECOM_LOG_EKF_QUAT message to the output stream buffer from the provided structure.
- Parameters
-
[out] pOutputStream Output stream buffer to write the payload to. [in] pInputData Pointer on the input structure that stores data to write.
- Returns
- SBG_NO_ERROR if the message has been generated in the provided buffer.
Definition at line 110 of file sbgEComBinaryLogEkf.c.
| SBG_INLINE uint32_t sbgEComLogEkfBuildSolutionStatus | ( | SbgEComSolutionMode | solutionMode, |
| uint32_t | masks | ||
| ) |
Method used to write the solution status field.
- Parameters
-
[in] solutionMode The solution mode to set. [in] masks Bit mask to set.
- Returns
- The build solution status field.
Definition at line 95 of file sbgEComBinaryLogEkf.h.
| SBG_INLINE SbgEComSolutionMode sbgEComLogEkfGetSolutionMode | ( | uint32_t | status | ) |
Method used to read the solution mode from a solution status field.
- Parameters
-
[in] status Status uint32_t value to extract the solution mode from it.
- Returns
- The extracted solution mode.
Definition at line 84 of file sbgEComBinaryLogEkf.h.