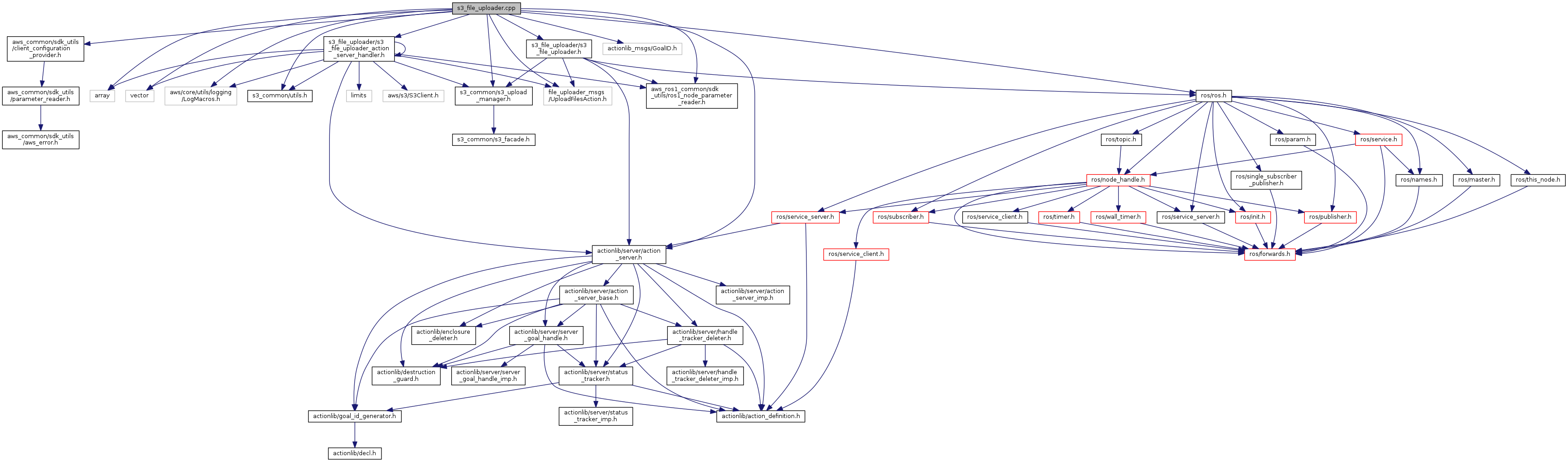
#include <array>#include <vector>#include <aws/core/utils/logging/LogMacros.h>#include <aws_ros1_common/sdk_utils/ros1_node_parameter_reader.h>#include <file_uploader_msgs/UploadFilesAction.h>#include <aws_common/sdk_utils/client_configuration_provider.h>#include <s3_common/s3_upload_manager.h>#include <s3_common/utils.h>#include <actionlib/server/action_server.h>#include <actionlib_msgs/GoalID.h>#include <ros/ros.h>#include <s3_file_uploader/s3_file_uploader.h>#include <s3_file_uploader/s3_file_uploader_action_server_handler.h>
Include dependency graph for s3_file_uploader.cpp:
Go to the source code of this file.
Namespaces | |
| Aws | |
| Aws::S3 | |
Variables | |
| constexpr char | kBucketNameParameter [] = "s3_bucket" |
| constexpr uint32_t | kDefaultNumberOfSpinnerThreads = 2 |
| constexpr char | kEnableEncryptionParameter [] = "enable_encryption" |
| constexpr char | kSpinnerThreadCountOverrideParameter [] = "spinner_thread_count" |
Variable Documentation
| constexpr char kBucketNameParameter[] = "s3_bucket" |
Definition at line 33 of file s3_file_uploader.cpp.
| constexpr uint32_t kDefaultNumberOfSpinnerThreads = 2 |
By default we use two threads to handle upload goals. You may specify a different setting via the "spinner_thread_count" parameter.
Definition at line 41 of file s3_file_uploader.cpp.
| constexpr char kEnableEncryptionParameter[] = "enable_encryption" |
Definition at line 34 of file s3_file_uploader.cpp.
| constexpr char kSpinnerThreadCountOverrideParameter[] = "spinner_thread_count" |
Definition at line 35 of file s3_file_uploader.cpp.