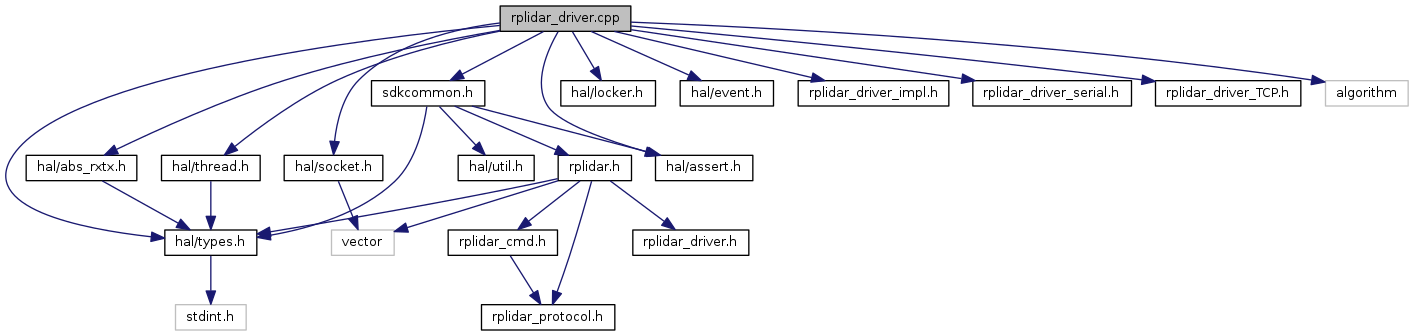
#include "sdkcommon.h"#include "hal/abs_rxtx.h"#include "hal/thread.h"#include "hal/types.h"#include "hal/assert.h"#include "hal/locker.h"#include "hal/socket.h"#include "hal/event.h"#include "rplidar_driver_impl.h"#include "rplidar_driver_serial.h"#include "rplidar_driver_TCP.h"#include <algorithm>
Include dependency graph for rplidar_driver.cpp:
Go to the source code of this file.
Namespaces | |
| rp | |
| rp::standalone | |
| rp::standalone::rplidar | |
Macros | |
| #define | DEPRECATED_WARN(fn, replacement) |
| #define | min(a, b) (((a) < (b)) ? (a) : (b)) |
Variables | |
| static _u32 | rp::standalone::rplidar::table [256] |
Macro Definition Documentation
| #define DEPRECATED_WARN | ( | fn, | |
| replacement | |||
| ) |
Value:
do { \
static bool __shown__ = false; \
if (!__shown__) { \
printDeprecationWarn(fn, replacement); \
__shown__ = true; \
} \
} while (0)
static void printDeprecationWarn(const char *fn, const char *replacement)
Definition: rplidar_driver.cpp:64
Definition at line 56 of file rplidar_driver.cpp.
| #define min | ( | a, | |
| b | |||
| ) | (((a) < (b)) ? (a) : (b)) |
Definition at line 51 of file rplidar_driver.cpp.