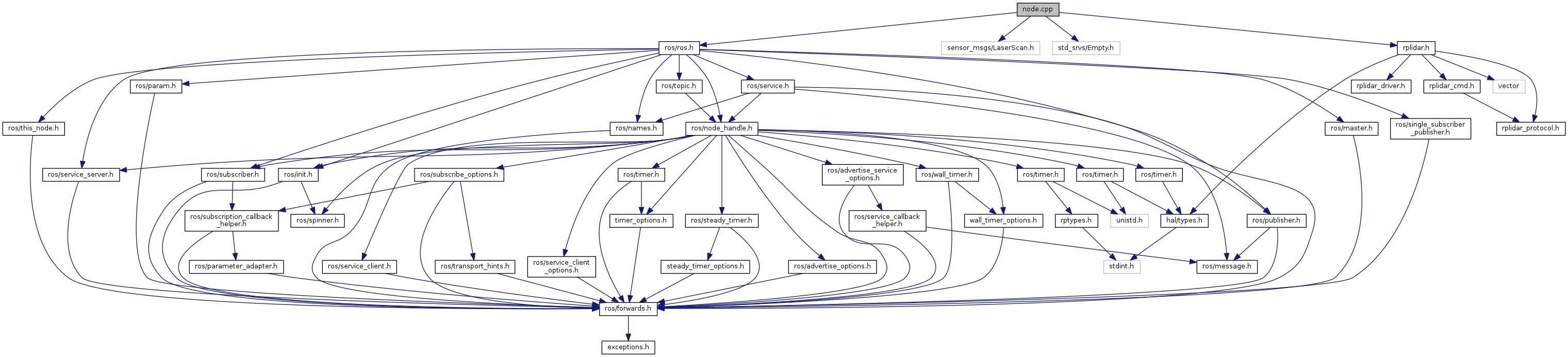
#include "ros/ros.h"
#include "sensor_msgs/LaserScan.h"
#include "std_srvs/Empty.h"
#include "rplidar.h"
Go to the source code of this file.
|
| #define | _countof(_Array) (int)(sizeof(_Array) / sizeof(_Array[0])) |
| |
| #define | DEG2RAD(x) ((x)*M_PI/180.) |
| |
|
| bool | checkRPLIDARHealth (RPlidarDriver *drv) |
| |
| static float | getAngle (const rplidar_response_measurement_node_hq_t &node) |
| |
| bool | getRPLIDARDeviceInfo (RPlidarDriver *drv) |
| |
| int | main (int argc, char *argv[]) |
| |
| void | publish_scan (ros::Publisher *pub, rplidar_response_measurement_node_hq_t *nodes, size_t node_count, ros::Time start, double scan_time, bool inverted, float angle_min, float angle_max, float max_distance, std::string frame_id) |
| |
| bool | start_motor (std_srvs::Empty::Request &req, std_srvs::Empty::Response &res) |
| |
| bool | stop_motor (std_srvs::Empty::Request &req, std_srvs::Empty::Response &res) |
| |
| #define _countof |
( |
|
_Array | ) |
(int)(sizeof(_Array) / sizeof(_Array[0])) |
| #define DEG2RAD |
( |
|
x | ) |
((x)*M_PI/180.) |
| int main |
( |
int |
argc, |
|
|
char * |
argv[] |
|
) |
| |
| bool start_motor |
( |
std_srvs::Empty::Request & |
req, |
|
|
std_srvs::Empty::Response & |
res |
|
) |
| |
| bool stop_motor |
( |
std_srvs::Empty::Request & |
req, |
|
|
std_srvs::Empty::Response & |
res |
|
) |
| |