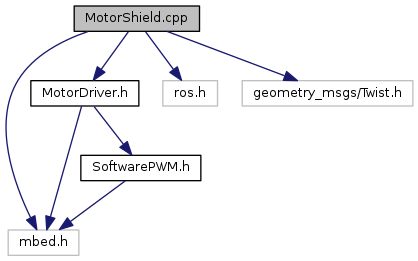
Include dependency graph for MotorShield.cpp:
Go to the source code of this file.
Functions | |
| int | main () |
| void | messageCb (const geometry_msgs::Twist &msg) |
Variables | |
| MotorDriver | motorDriver (MOTORSHIELD_IN1, MOTORSHIELD_IN2, MOTORSHIELD_IN3, MOTORSHIELD_IN4, SPEEDPIN_A, SPEEDPIN_B) |
| ros::NodeHandle | nh |
| ros::Subscriber< geometry_msgs::Twist > | sub ("cmd_vel",&messageCb) |
| Timer | t |
Function Documentation
| int main | ( | void | ) |
Definition at line 80 of file MotorShield.cpp.
| void messageCb | ( | const geometry_msgs::Twist & | msg | ) |
Definition at line 38 of file MotorShield.cpp.
Variable Documentation
| MotorDriver motorDriver(MOTORSHIELD_IN1, MOTORSHIELD_IN2, MOTORSHIELD_IN3, MOTORSHIELD_IN4, SPEEDPIN_A, SPEEDPIN_B) |
Definition at line 36 of file MotorShield.cpp.
| ros::Subscriber<geometry_msgs::Twist> sub("cmd_vel",&messageCb) |
| Timer t |
Definition at line 78 of file MotorShield.cpp.