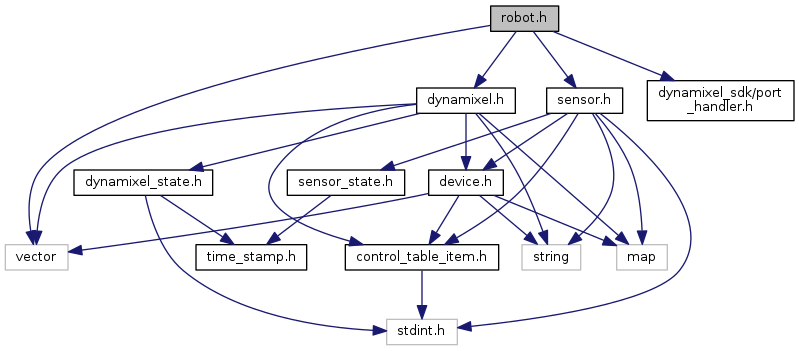
#include <vector>#include "sensor.h"#include "dynamixel.h"#include "dynamixel_sdk/port_handler.h"
Include dependency graph for robot.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | robotis_framework::Robot |
Namespaces | |
| robotis_framework | |
Macros | |
| #define | DEFAULT_CONTROL_CYCLE 8 |
| #define | DYNAMIXEL "dynamixel" |
| #define | SENSOR "sensor" |
| #define | SESSION_CONTROL_INFO "control info" |
| #define | SESSION_CONTROL_TABLE "control table" |
| #define | SESSION_DEVICE_INFO "device info" |
| #define | SESSION_PORT_INFO "port info" |
| #define | SESSION_TYPE_INFO "type info" |