#include <string.h>#include <stdio.h>#include "ros/ros.h"#include "std_msgs/String.h"#include "geometry_msgs/WrenchStamped.h"#include "robotiq_ft_sensor/rq_sensor_state.h"#include "robotiq_ft_sensor/ft_sensor.h"#include "robotiq_ft_sensor/sensor_accessor.h"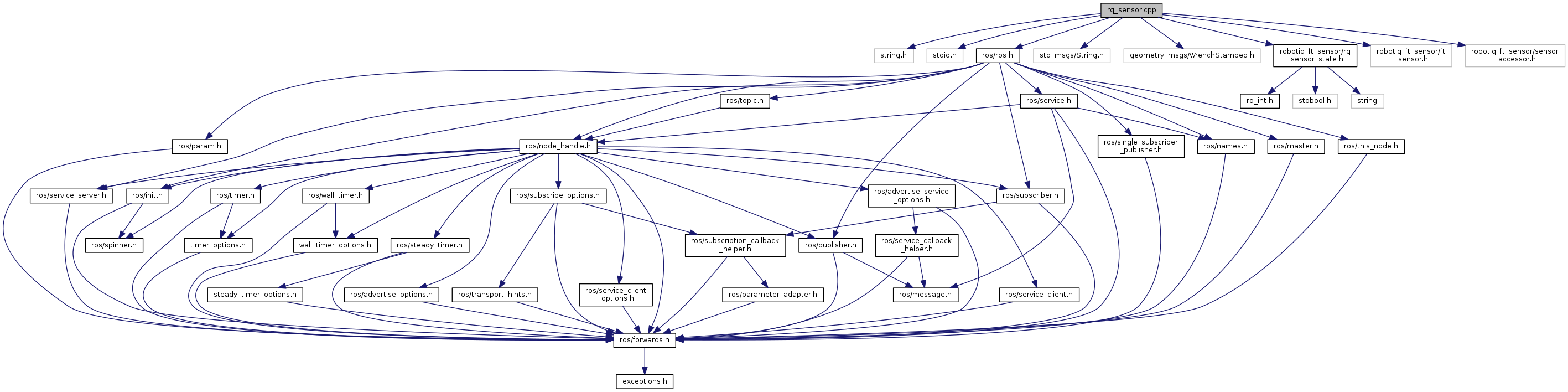
Go to the source code of this file.
Typedefs | |
| typedef robotiq_ft_sensor::sensor_accessor::Request | Request |
Functions | |
| static bool | decode_message_and_do (robotiq_ft_sensor::sensor_accessor::Request &req, robotiq_ft_sensor::sensor_accessor::Response &res) |
| decode_message_and_do Decode the message received and do the associated action More... | |
| static void | decode_message_and_do (INT_8 const *const buff, INT_8 *const ret) |
| Decode the message received and do the associated action. More... | |
| static robotiq_ft_sensor::ft_sensor | get_data (void) |
| Builds the message with the force/torque data. More... | |
| int | main (int argc, char **argv) |
| static int | max_retries_ (100) |
| bool | receiverCallback (robotiq_ft_sensor::sensor_accessor::Request &req, robotiq_ft_sensor::sensor_accessor::Response &res) |
| static INT_8 | sensor_state_machine () |
| static void | wait_for_other_connection () |
| Each second, checks for a sensor that has been connected. More... | |
Variables | |
| std::string | ftdi_id |
| ros::Publisher | sensor_pub_acc |
Detailed Description
- Date
- July 14, 2014
Definition in file rq_sensor.cpp.
Typedef Documentation
| typedef robotiq_ft_sensor::sensor_accessor::Request Request |
Definition at line 53 of file rq_sensor.cpp.
Function Documentation
|
static |
decode_message_and_do Decode the message received and do the associated action
- Parameters
-
req request (of which the command_id is used) res result with requested data
- Returns
- true iff a valid command_id was given in the request
Definition at line 66 of file rq_sensor.cpp.
Decode the message received and do the associated action.
- Parameters
-
buff message to decode ret buffer containing the return value from a GET command
Definition at line 92 of file rq_sensor.cpp.
|
static |
Builds the message with the force/torque data.
- Returns
- ft_sensor updated with the latest data
Definition at line 178 of file rq_sensor.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 192 of file rq_sensor.cpp.
|
static |
| bool receiverCallback | ( | robotiq_ft_sensor::sensor_accessor::Request & | req, |
| robotiq_ft_sensor::sensor_accessor::Response & | res | ||
| ) |
Support for old string-based interface
New interface with numerical commands
Definition at line 119 of file rq_sensor.cpp.
|
static |
Definition at line 139 of file rq_sensor.cpp.
|
static |
Each second, checks for a sensor that has been connected.
Definition at line 153 of file rq_sensor.cpp.
Variable Documentation
| std::string ftdi_id |
Definition at line 55 of file rq_sensor.cpp.
| ros::Publisher sensor_pub_acc |
Definition at line 57 of file rq_sensor.cpp.