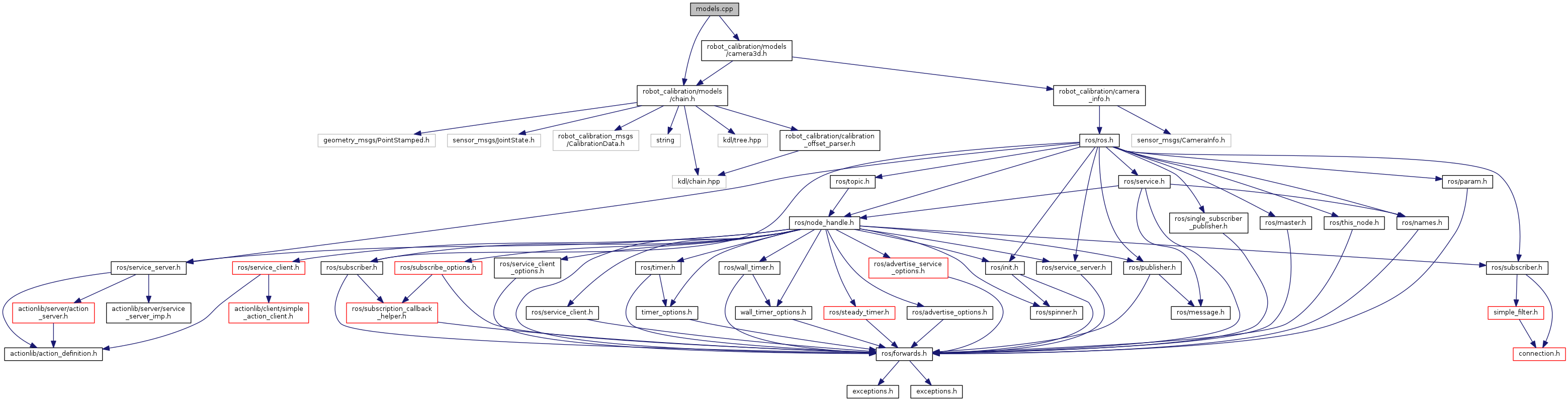
Include dependency graph for models.cpp:
Go to the source code of this file.
Namespaces | |
| robot_calibration | |
| Calibration code lives under this namespace. | |
Functions | |
| void | robot_calibration::axis_magnitude_from_rotation (const KDL::Rotation &r, double &x, double &y, double &z) |
| Converts from KDL::Rotation to angle-axis-with-integrated-magnitude. More... | |
| double | robot_calibration::positionFromMsg (const std::string &name, const sensor_msgs::JointState &msg) |
| KDL::Rotation | robot_calibration::rotation_from_axis_magnitude (const double x, const double y, const double z) |
| Converts our angle-axis-with-integrated-magnitude representation to a KDL::Rotation. More... | |