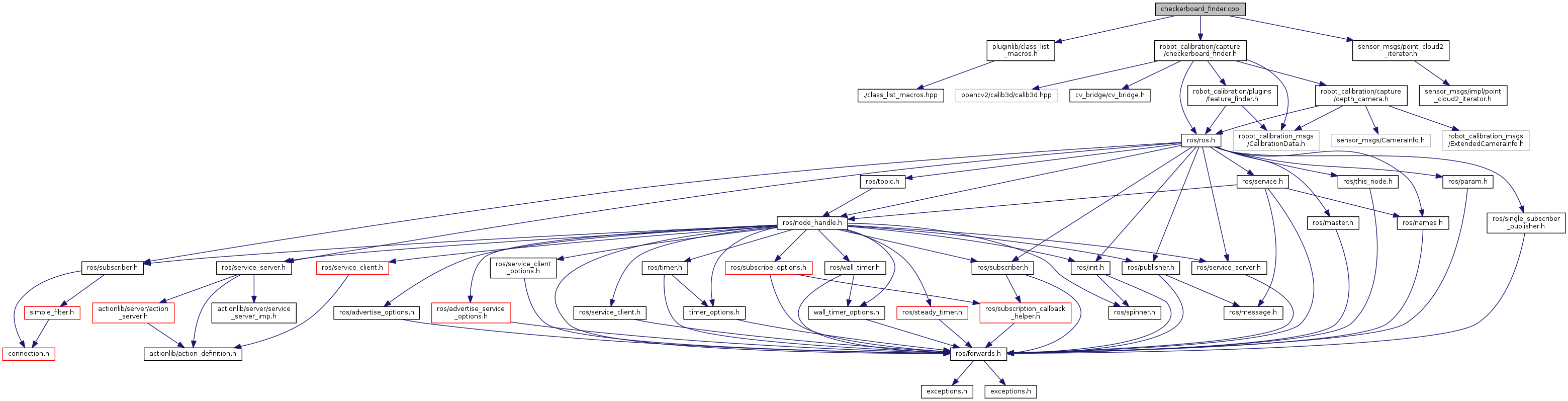
#include <pluginlib/class_list_macros.h>#include <robot_calibration/capture/checkerboard_finder.h>#include <sensor_msgs/point_cloud2_iterator.h>
Include dependency graph for checkerboard_finder.cpp:
Go to the source code of this file.
Namespaces | |
| robot_calibration | |
| Calibration code lives under this namespace. | |
Variables | |
| const unsigned | robot_calibration::X = 0 |
| const unsigned | robot_calibration::Y = 1 |
| const unsigned | robot_calibration::Z = 2 |