#include "pointcloud.h"#include <iostream>#include <fstream>#include <sstream>#include <iomanip>#include <vector>#include <cmath>#include <algorithm>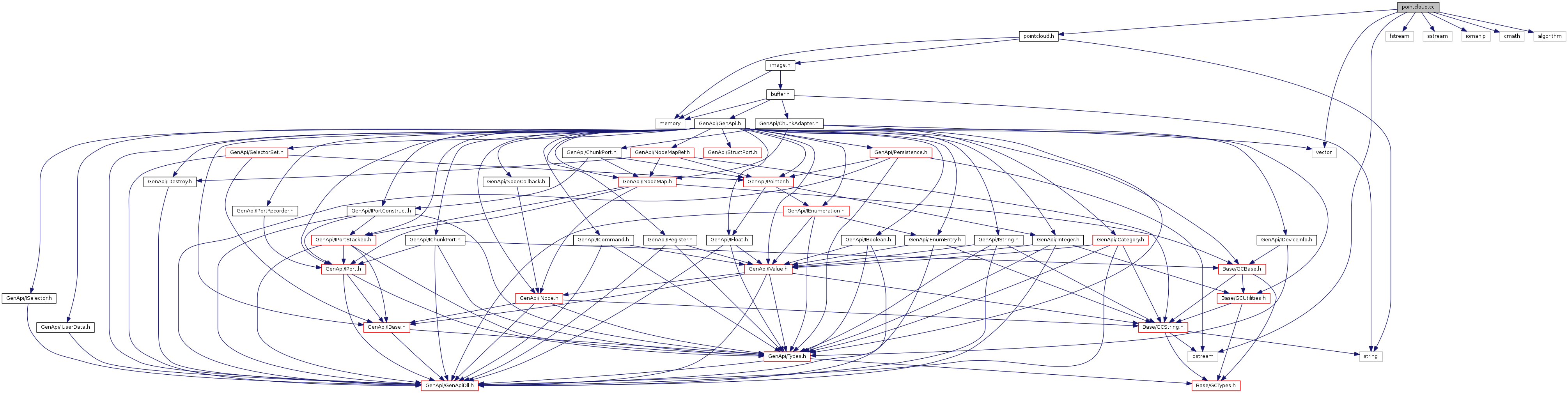
Go to the source code of this file.
Namespaces | |
| rcg | |
Functions | |
| void | rcg::storePointCloud (std::string name, double f, double t, double scale, std::shared_ptr< const Image > left, std::shared_ptr< const Image > disp, std::shared_ptr< const Image > conf, std::shared_ptr< const Image > error) |

