definitions of quaternion operation More...
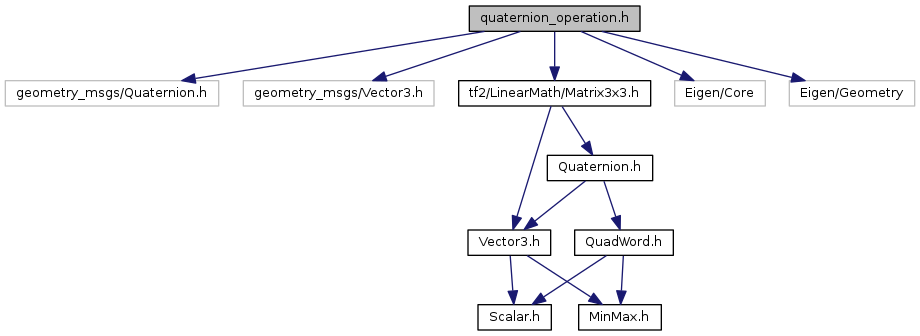
#include <geometry_msgs/Quaternion.h>#include <geometry_msgs/Vector3.h>#include <tf2/LinearMath/Matrix3x3.h>#include <Eigen/Core>#include <Eigen/Geometry>
Include dependency graph for quaternion_operation.h:
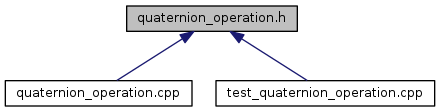
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| quaternion_operation | |
| namespace of quaternion_operation ROS package | |
Macros | |
| #define | EIGEN_MPL2_ONLY |
Functions | |
| geometry_msgs::Quaternion | quaternion_operation::conjugate (geometry_msgs::Quaternion quat1) |
| get conjugate Quaternion More... | |
| geometry_msgs::Quaternion | quaternion_operation::convertEulerAngleToQuaternion (geometry_msgs::Vector3 euler) |
| convert Euler angles to Quaternion More... | |
| geometry_msgs::Vector3 | quaternion_operation::convertQuaternionToEulerAngle (geometry_msgs::Quaternion quat) |
| convert Quaternion to the Euler angle More... | |
| Eigen::MatrixXd | quaternion_operation::convertToEigenMatrix (geometry_msgs::Quaternion quat) |
| convert geometry_msgs::Quaternion to Eigen::MatrixXd More... | |
| bool | quaternion_operation::equals (double a, double b) |
| checke 2 double values are equal or not More... | |
| bool | quaternion_operation::equals (geometry_msgs::Quaternion quat1, geometry_msgs::Quaternion quat2) |
| check 2 Quaternion values are equal or not More... | |
| geometry_msgs::Quaternion | quaternion_operation::getRotation (geometry_msgs::Quaternion from, geometry_msgs::Quaternion to) |
| Get the Rotation from 2 Quaternions. More... | |
| Eigen::Matrix3d | quaternion_operation::getRotationMatrix (geometry_msgs::Quaternion quat) |
| Get the Rotation Matrix from geometry_msgs::Quaternion. More... | |
| geometry_msgs::Quaternion | operator* (geometry_msgs::Quaternion quat1, geometry_msgs::Quaternion quat2) |
| |
| geometry_msgs::Quaternion | operator+ (geometry_msgs::Quaternion quat1, geometry_msgs::Quaternion quat2) |
| |
| geometry_msgs::Quaternion | quaternion_operation::rotation (geometry_msgs::Quaternion from, geometry_msgs::Quaternion rotation) |
| rotate Quaternion More... | |
| geometry_msgs::Quaternion | quaternion_operation::slerp (geometry_msgs::Quaternion quat1, geometry_msgs::Quaternion quat2, double t) |
| Spherical linear interpolation function for geometry_msgs::Quaternion. More... | |
Detailed Description
definitions of quaternion operation
- Version
- 0.1
- Date
- 2019-04-21
- Copyright
- Copyright (c) 2019
Definition in file quaternion_operation.h.
Macro Definition Documentation
| #define EIGEN_MPL2_ONLY |
Definition at line 21 of file quaternion_operation.h.
Function Documentation
| geometry_msgs::Quaternion operator* | ( | geometry_msgs::Quaternion | quat1, |
| geometry_msgs::Quaternion | quat2 | ||
| ) |
- Operator overload for geometry_msgs::Quaternion (Multiplication)
- Parameters
-
quat1 quat2
- Returns
- geometry_msgs::Quaternion result of Multiplication
Definition at line 24 of file quaternion_operation.cpp.
| geometry_msgs::Quaternion operator+ | ( | geometry_msgs::Quaternion | quat1, |
| geometry_msgs::Quaternion | quat2 | ||
| ) |
- Operator overload for geometry_msgs::Quaternion (Addition)
- Parameters
-
quat1 quat2
- Returns
- geometry_msgs::Quaternion result of Addition
Definition at line 14 of file quaternion_operation.cpp.