#include <boost/python.hpp>#include "pinocchio/multibody/joint/joint-collection.hpp"#include "pinocchio/multibody/joint/joint-composite.hpp"#include "pinocchio/multibody/joint/joint-generic.hpp"#include <eigenpy/eigen-to-python.hpp>
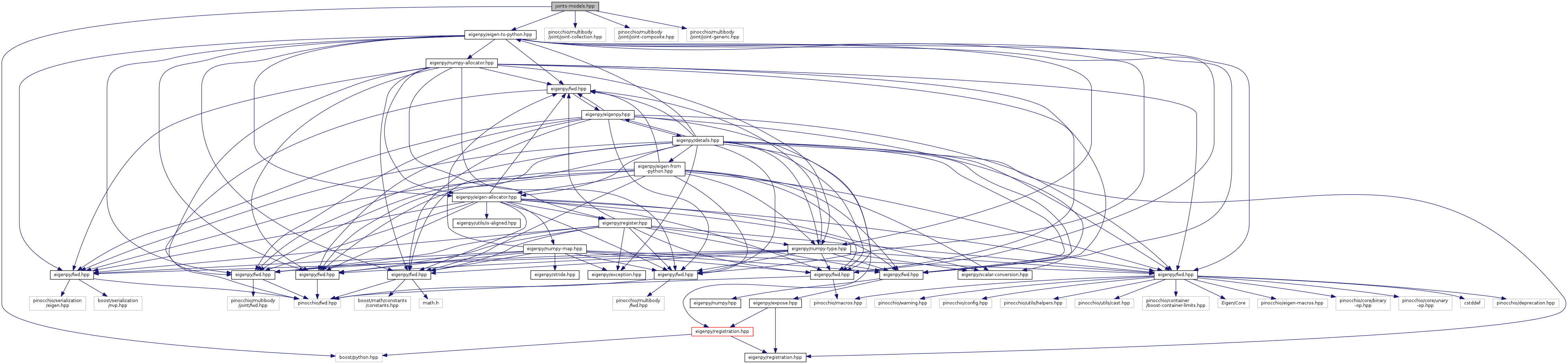
Include dependency graph for joints-models.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | pinocchio::python::JointModelCompositeAddJointVisitor |
| struct | pinocchio::python::JointModelCompositeConstructorVisitor |
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
| pinocchio::python | |
Functions | |
| static JointModelComposite & | pinocchio::python::addJoint_proxy (JointModelComposite &joint_composite, const JointModel &jmodel, const SE3 &joint_placement=SE3::Identity()) |
| template<class T > | |
| bp::class_< T > & | pinocchio::python::expose_joint_model (bp::class_< T > &cl) |
| template<> | |
| bp::class_< JointModelComposite > & | pinocchio::python::expose_joint_model< JointModelComposite > (bp::class_< JointModelComposite > &cl) |
| template<> | |
| bp::class_< JointModelPrismaticUnaligned > & | pinocchio::python::expose_joint_model< JointModelPrismaticUnaligned > (bp::class_< JointModelPrismaticUnaligned > &cl) |
| template<> | |
| bp::class_< JointModelRevoluteUnaligned > & | pinocchio::python::expose_joint_model< JointModelRevoluteUnaligned > (bp::class_< JointModelRevoluteUnaligned > &cl) |
| static JointModelComposite * | pinocchio::python::init_proxy1 (const JointModel &jmodel) |
| static JointModelComposite * | pinocchio::python::init_proxy2 (const JointModel &jmodel, const SE3 &joint_placement) |