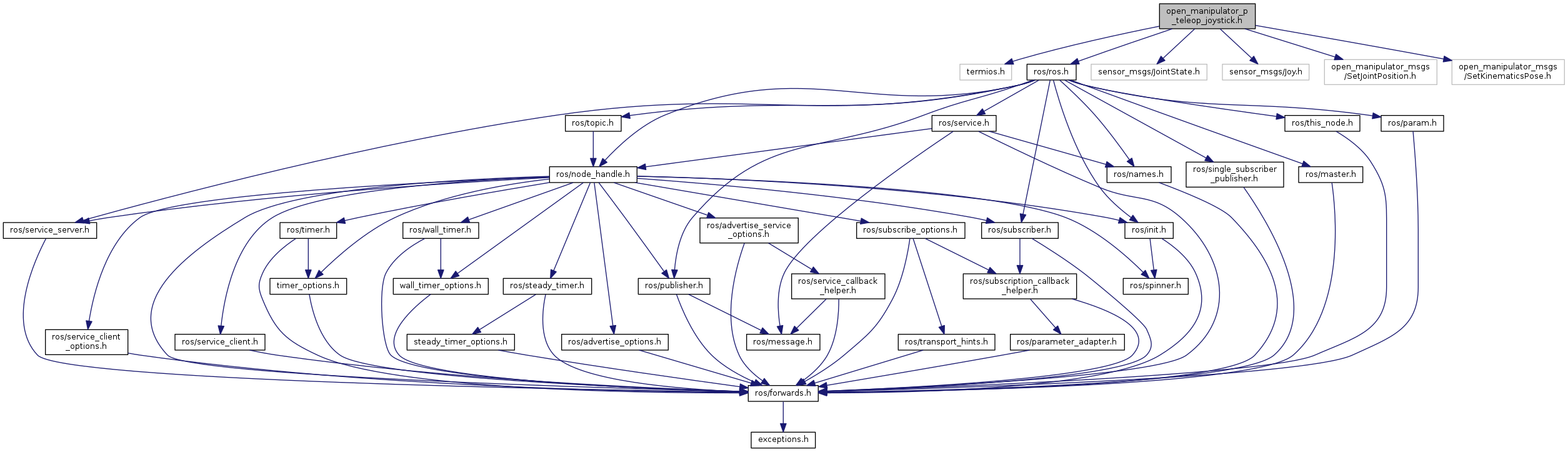
#include <termios.h>#include <ros/ros.h>#include <sensor_msgs/JointState.h>#include <sensor_msgs/Joy.h>#include "open_manipulator_msgs/SetJointPosition.h"#include "open_manipulator_msgs/SetKinematicsPose.h"
Include dependency graph for open_manipulator_p_teleop_joystick.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | OpenManipulatorTeleop |
Macros | |
| #define | DELTA 0.01 |
| #define | JOINT_DELTA 0.05 |
| #define | NUM_OF_JOINT 6 |
| #define | PATH_TIME 0.5 |
| #define | PI 3.141592 |
Macro Definition Documentation
| #define DELTA 0.01 |
Definition at line 33 of file open_manipulator_p_teleop_joystick.h.
| #define JOINT_DELTA 0.05 |
Definition at line 34 of file open_manipulator_p_teleop_joystick.h.
| #define NUM_OF_JOINT 6 |
Definition at line 32 of file open_manipulator_p_teleop_joystick.h.
| #define PATH_TIME 0.5 |
Definition at line 35 of file open_manipulator_p_teleop_joystick.h.
| #define PI 3.141592 |
Definition at line 31 of file open_manipulator_p_teleop_joystick.h.