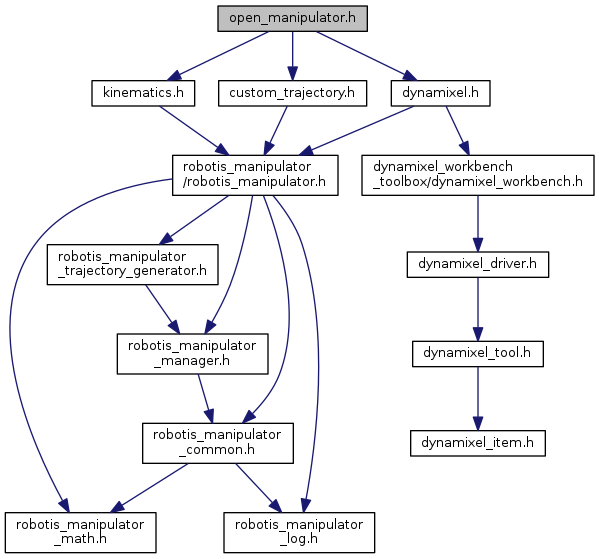
Include dependency graph for open_manipulator.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | OpenManipulator |
Macros | |
| #define | CUSTOM_TRAJECTORY_CIRCLE "custom_trajectory_circle" |
| #define | CUSTOM_TRAJECTORY_HEART "custom_trajectory_heart" |
| #define | CUSTOM_TRAJECTORY_LINE "custom_trajectory_line" |
| #define | CUSTOM_TRAJECTORY_RHOMBUS "custom_trajectory_rhombus" |
| #define | CUSTOM_TRAJECTORY_SIZE 4 |
| #define | JOINT_DYNAMIXEL "joint_dxl" |
| #define | TOOL_DYNAMIXEL "tool_dxl" |
| #define | X_AXIS robotis_manipulator::math::vector3(1.0, 0.0, 0.0) |
| #define | Y_AXIS robotis_manipulator::math::vector3(0.0, 1.0, 0.0) |
| #define | Z_AXIS robotis_manipulator::math::vector3(0.0, 0.0, 1.0) |
Macro Definition Documentation
| #define CUSTOM_TRAJECTORY_CIRCLE "custom_trajectory_circle" |
Definition at line 28 of file open_manipulator.h.
| #define CUSTOM_TRAJECTORY_HEART "custom_trajectory_heart" |
Definition at line 30 of file open_manipulator.h.
| #define CUSTOM_TRAJECTORY_LINE "custom_trajectory_line" |
Definition at line 27 of file open_manipulator.h.
| #define CUSTOM_TRAJECTORY_RHOMBUS "custom_trajectory_rhombus" |
Definition at line 29 of file open_manipulator.h.
| #define CUSTOM_TRAJECTORY_SIZE 4 |
Definition at line 26 of file open_manipulator.h.
| #define JOINT_DYNAMIXEL "joint_dxl" |
Definition at line 32 of file open_manipulator.h.
| #define TOOL_DYNAMIXEL "tool_dxl" |
Definition at line 33 of file open_manipulator.h.
| #define X_AXIS robotis_manipulator::math::vector3(1.0, 0.0, 0.0) |
Definition at line 35 of file open_manipulator.h.
| #define Y_AXIS robotis_manipulator::math::vector3(0.0, 1.0, 0.0) |
Definition at line 36 of file open_manipulator.h.
| #define Z_AXIS robotis_manipulator::math::vector3(0.0, 0.0, 1.0) |
Definition at line 37 of file open_manipulator.h.