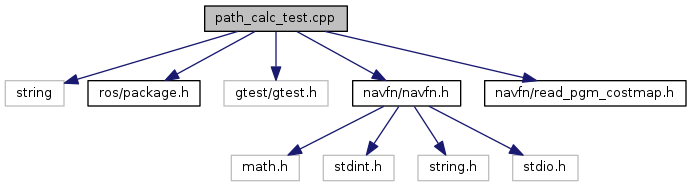
#include <string>#include <ros/package.h>#include <gtest/gtest.h>#include <navfn/navfn.h>#include <navfn/read_pgm_costmap.h>
Include dependency graph for path_calc_test.cpp:
Go to the source code of this file.
Functions | |
| int | main (int argc, char **argv) |
| navfn::NavFn * | make_willow_nav () |
| void | print_neighborhood_of_last_path_entry (navfn::NavFn *nav) |
| TEST (PathCalc, oscillate_in_pinch_point) | |
| TEST (PathCalc, easy_nav_should_always_work) | |
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 156 of file path_calc_test.cpp.
| navfn::NavFn* make_willow_nav | ( | ) |
Definition at line 38 of file path_calc_test.cpp.
| void print_neighborhood_of_last_path_entry | ( | navfn::NavFn * | nav | ) |
Definition at line 57 of file path_calc_test.cpp.
| TEST | ( | PathCalc | , |
| oscillate_in_pinch_point | |||
| ) |
Definition at line 111 of file path_calc_test.cpp.
| TEST | ( | PathCalc | , |
| easy_nav_should_always_work | |||
| ) |
Definition at line 136 of file path_calc_test.cpp.