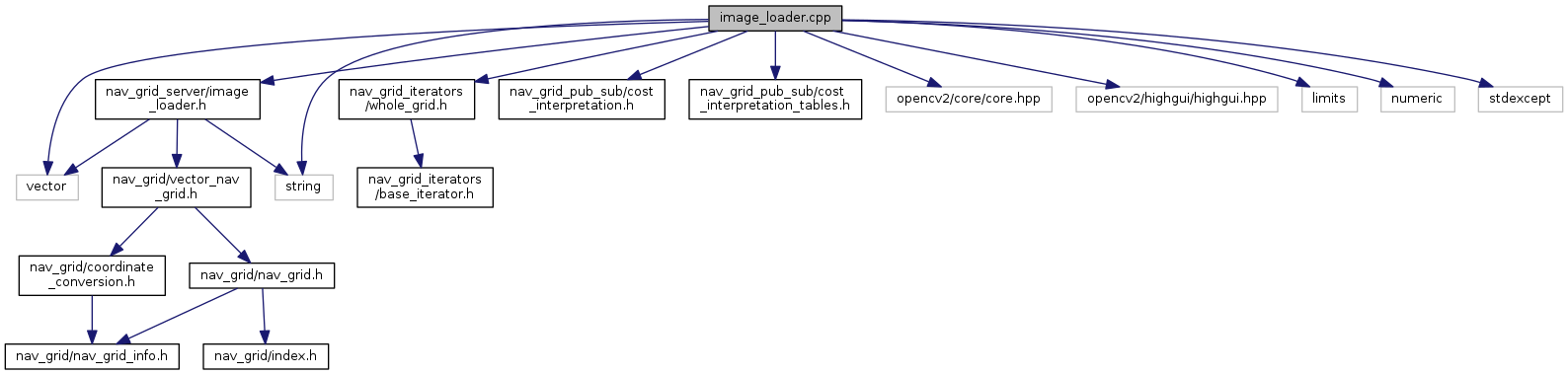
#include <nav_grid_server/image_loader.h>#include <nav_grid_iterators/whole_grid.h>#include <nav_grid_pub_sub/cost_interpretation.h>#include <nav_grid_pub_sub/cost_interpretation_tables.h>#include <opencv2/core/core.hpp>#include <opencv2/highgui/highgui.hpp>#include <limits>#include <numeric>#include <stdexcept>#include <string>#include <vector>
Include dependency graph for image_loader.cpp:
Go to the source code of this file.
Namespaces | |
| nav_grid_server | |
Functions | |
| nav_grid::VectorNavGrid< unsigned char > | nav_grid_server::classicLoadMapFromFile (const std::string &filepath, const double resolution, const bool negate_param, const double occ_th, const double free_th, const std::string &mode) |
| Load an image from a file, mimicking map_server's loading style Resulting values are [0, 100] and -1. More... | |
| nav_grid::VectorNavGrid< unsigned char > | nav_grid_server::getCostmapFromImage (const std::string &filepath, bool flip_y_axis=true) |
| Load an image from a file and return values [0, 255]. More... | |
| template<typename T > | |
| nav_grid::VectorNavGrid< Pixel > | nav_grid_server::getImage (const cv::Mat &cv_img, bool flip_y_axis=false) |
| nav_grid::VectorNavGrid< Pixel > | nav_grid_server::getImage (const std::string &filepath, bool flip_y_axis=true) |
| Load an image as a NavGrid of pixels. More... | |
| nav_grid::VectorNavGrid< double > | nav_grid_server::getImageIntensity (const std::string &filepath, bool flip_y_axis=true) |
| Load an image from a file and return the image intensity at each pixel. More... | |
| template<typename T > | |
| double | nav_grid_server::scaleNumber (T raw_value) |