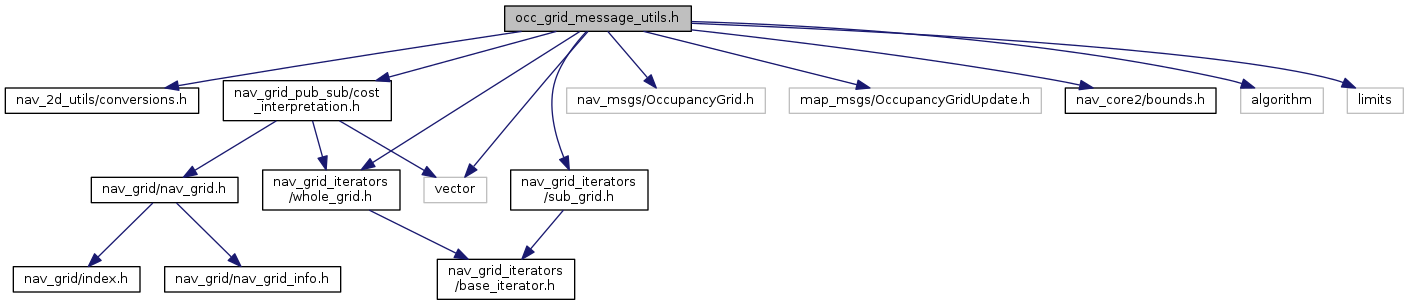
#include <nav_2d_utils/conversions.h>#include <nav_grid_pub_sub/cost_interpretation.h>#include <nav_msgs/OccupancyGrid.h>#include <map_msgs/OccupancyGridUpdate.h>#include <nav_core2/bounds.h>#include <nav_grid_iterators/whole_grid.h>#include <nav_grid_iterators/sub_grid.h>#include <algorithm>#include <limits>#include <vector>
Include dependency graph for occ_grid_message_utils.h:
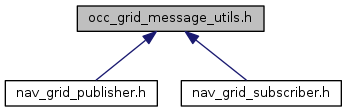
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| nav_grid_pub_sub | |
Functions | |
| template<typename NumericType > | |
| void | nav_grid_pub_sub::fromOccupancyGrid (const nav_msgs::OccupancyGrid &msg, nav_grid::NavGrid< NumericType > &grid, const std::vector< NumericType > &cost_interpretation_table) |
| generic OccupancyGrid to NavGrid conversion using cost_interpretation_table More... | |
| template<typename NumericType > | |
| nav_core2::UIntBounds | nav_grid_pub_sub::fromOccupancyGridUpdate (const map_msgs::OccupancyGridUpdate &update, nav_grid::NavGrid< NumericType > &grid, const std::vector< NumericType > &cost_interpretation_table) |
| generic OccupancyGridUpdate to NavGrid conversion using cost_interpretation_table. More... | |
| template<typename NumericType > | |
| void | nav_grid_pub_sub::getExtremeValues (const nav_grid::NavGrid< NumericType > &grid, const NumericType unknown_value, NumericType &min_val, NumericType &max_val) |
| Retrieve the minimum and maximum values from a grid, ignoring the unknown_value. More... | |
| nav_msgs::OccupancyGrid | nav_grid_pub_sub::toOccupancyGrid (const nav_grid::NavGrid< unsigned char > &grid, const ros::Time &stamp=ros::Time(0), const std::vector< unsigned char > cost_interpretation_table=std::vector< unsigned char >()) |
| NavGrid<unsigned char> to OccupancyGrid using cost_interpretation_table. More... | |
| template<typename NumericType > | |
| nav_msgs::OccupancyGrid | nav_grid_pub_sub::toOccupancyGrid (const nav_grid::NavGrid< NumericType > &grid, const NumericType min_value, const NumericType max_value, const NumericType unknown_value, const ros::Time &stamp=ros::Time(0)) |
| generic NavGrid to OccupancyGrid using scaling. Min and max explicitly provided. More... | |
| template<typename NumericType > | |
| nav_msgs::OccupancyGrid | nav_grid_pub_sub::toOccupancyGrid (const nav_grid::NavGrid< NumericType > &grid, const NumericType unknown_value=std::numeric_limits< NumericType >::max(), const ros::Time &stamp=ros::Time(0)) |
| generic NavGrid to OccupancyGrid using scaling. Min and max not provided, so they are determined first. More... | |
| map_msgs::OccupancyGridUpdate | nav_grid_pub_sub::toOccupancyGridUpdate (const nav_grid::NavGrid< unsigned char > &grid, const nav_core2::UIntBounds &bounds, const ros::Time &stamp=ros::Time(0), const std::vector< unsigned char > cost_interpretation_table=std::vector< unsigned char >()) |
| NavGrid<unsigned char> to OccupancyGridUpdate using cost_interpretation_table. More... | |
| template<typename NumericType > | |
| map_msgs::OccupancyGridUpdate | nav_grid_pub_sub::toOccupancyGridUpdate (const nav_grid::NavGrid< NumericType > &grid, const nav_core2::UIntBounds &bounds, const NumericType min_value, const NumericType max_value, const NumericType unknown_value, const ros::Time &stamp=ros::Time(0)) |
| generic NavGrid to OccupancyGridUpdate using scaling. Min and max explicitly provided. More... | |