#include <SensorData.h>
Public Member Functions | |
| LocalizedObject (const Identifier &rSensorIdentifier) | |
 Public Member Functions inherited from karto::Object Public Member Functions inherited from karto::Object | |
| Object () | |
| Object (const Identifier &rIdentifier) | |
| Public Member Functions inherited from karto::Referenced | |
| Referenced () | |
Protected Member Functions | |
| const Pose2 & | GetCorrectedPose () const |
| gps::PointGps | GetGpsEstimate () const |
| gps::PointGps | GetGpsReading () const |
| const Pose2 & | GetOdometricPose () const |
| kt_bool | IsGpsEstimateValid () const |
| kt_bool | IsGpsReadingValid () const |
| virtual void | SetCorrectedPose (const Pose2 &rPose) |
| void | SetGpsEstimate (const gps::PointGps &rGpsEstimate) |
| void | SetGpsEstimationManager (AbstractGpsEstimationManager *pGpsEstimationManager) |
| void | SetGpsReading (const gps::PointGps &rGpsReading) |
| void | SetOdometricPose (const Pose2 &rOdometricPose) |
| Protected Member Functions inherited from karto::SensorData | |
| void | AddCustomItem (CustomItem *pCustomItem) |
| const CustomItemList & | GetCustomItems () const |
| const Identifier & | GetSensorIdentifier () const |
| kt_int32s | GetStateId () const |
| kt_int64s | GetTime () const |
| kt_int32s | GetUniqueId () const |
| kt_bool | HasCustomItem () |
| SensorData (const Identifier &rSensorIdentifier) | |
| void | SetSensorIdentifier (const Identifier &rSensorIdentifier) |
| void | SetStateId (kt_int32s stateId) |
| void | SetTime (kt_int64s time) |
| void | SetUniqueId (kt_int32u uniqueId) |
| Protected Member Functions inherited from karto::Object | |
| const Identifier & | GetIdentifier () const |
| AbstractParameter * | GetParameter (const String &rParameterName) const |
| template<typename T > | |
| Parameter< T > * | GetParameter (const String &rParameterName) const |
| ParameterList | GetParameters () |
| ParameterSet * | GetParameterSet () |
| template<typename T > | |
| void | SetParameters (const karto::String &rParameterName, const T &rValue) |
| Protected Member Functions inherited from karto::Referenced | |
| kt_int32s | GetReferenceCount () |
| kt_int32s | Reference () const |
| kt_int32s | Unreference () const |
| kt_int32s | UnreferenceNoDelete () const |
Private Member Functions | |
| KARTO_RTTI () | |
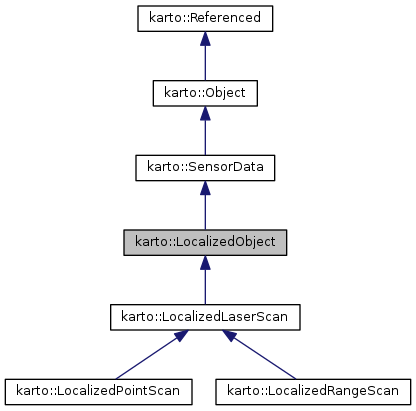
Detailed Description
Base class for all localized sensor data
Definition at line 356 of file SensorData.h.
Constructor & Destructor Documentation
| karto::LocalizedObject::LocalizedObject | ( | const Identifier & | rSensorIdentifier | ) |
Localized object from the given sensor
- Parameters
-
rSensorIdentifier sensor identifier
Definition at line 91 of file SensorData.cpp.
Member Function Documentation
|
inlineprotected |
Gets the (possibly corrected) robot pose at which this object was taken. The corrected robot pose of the object is usually set by an external module such as a localization or mapping module when it is determined that the original pose was incorrect. The external module will set the correct pose based on additional sensor data and any context information it has. If the pose has not been corrected, a call to this method returns the same pose as GetOdometricPose().
- Returns
- corrected pose
Definition at line 402 of file SensorData.h.
|
inlineprotected |
Gets the GPS estimate of this scan (return value is meaningless if IsGpsEstimateValid() returns false).
- Returns
- GPS estimate of this scan
Definition at line 450 of file SensorData.h.
|
inlineprotected |
Gets the GPS reading of this scan (return value is meaningless if IsGpsReadingValid() returns false).
- Returns
- GPS reading of this scan
Definition at line 421 of file SensorData.h.
|
inlineprotected |
public: /** Gets the odometric pose of this object
- Returns
- odometric pose of this object
Definition at line 380 of file SensorData.h.
|
inlineprotected |
Whether the GPS estimate is valid
- Returns
- whether the GPS estimate is valid
Definition at line 483 of file SensorData.h.
|
inlineprotected |
Whether the GPS reading is valid
- Returns
- whether the GPS reading is valid
Definition at line 440 of file SensorData.h.
|
private |
|
inlineprotectedvirtual |
Moves the object by moving the robot pose to the given location.
- Parameters
-
rPose new pose of the robot of this scan
Reimplemented in karto::LocalizedLaserScan.
Definition at line 411 of file SensorData.h.
|
inlineprotected |
Sets the GPS estimate of this scan
- Parameters
-
rGpsEstimate GPS estimate of this scan
Definition at line 466 of file SensorData.h.
|
inlineprotected |
Sets the manager for estimating this scan's GPS coordinate
- Parameters
-
pGpsEstimationManager GPS estimation manager
Definition at line 499 of file SensorData.h.
|
inlineprotected |
Sets the GPS reading of this scan
- Parameters
-
rGpsReading GPS reading of this scan
Definition at line 430 of file SensorData.h.
|
inlineprotected |
Sets the odometric pose of this object
- Parameters
-
rOdometricPose new odometric pose
Definition at line 389 of file SensorData.h.
Member Data Documentation
|
private |
Corrected pose of object calculated by mapper (or some other module)
Definition at line 513 of file SensorData.h.
|
private |
GPS estimate of this object (value is meaningless if m_IsGpsEstimateValid is false).
Definition at line 530 of file SensorData.h.
|
private |
GPS reading of this object (value is meaningless if m_IsGpsReadingValid is false).
Definition at line 519 of file SensorData.h.
|
private |
Whether the GPS estimate is valid
Definition at line 535 of file SensorData.h.
|
private |
Whether the GPS reading is valid
Definition at line 524 of file SensorData.h.
|
private |
Odometric pose of object
Definition at line 508 of file SensorData.h.
|
private |
Manages the location of robot in GPS coordinates
Definition at line 540 of file SensorData.h.
The documentation for this class was generated from the following files: