#include <gtest/gtest.h>#include <moveit/robot_interaction/locked_robot_state.h>#include <moveit/robot_model/robot_model.h>#include <moveit/robot_state/robot_state.h>#include <urdf_parser/urdf_parser.h>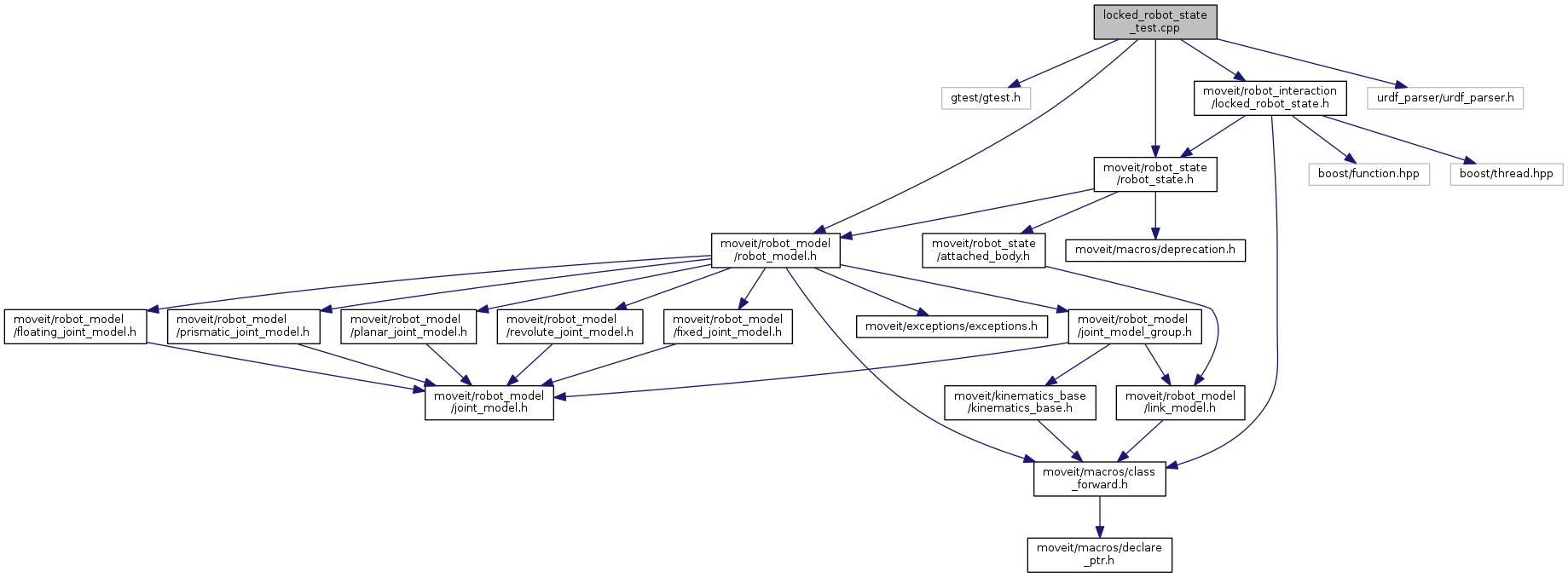
Go to the source code of this file.
Classes | |
| class | MyInfo |
| class | Super1 |
Enumerations | |
| enum | { JOINT_A = 3, JOINT_C = 4, MIM_F = 5, JOINT_F = 6 } |
Functions | |
| static moveit::core::RobotModelPtr | getModel () |
| int | main (int argc, char **argv) |
| static void | modify1 (robot_state::RobotState *state) |
| static void | runThreads (int ncheck, int nset, int nmod) |
| TEST (LockedRobotState, load) | |
| TEST (LockedRobotState, URDF_sanity) | |
| TEST (LockedRobotState, robotStateChanged) | |
| TEST (LockedRobotState, set1) | |
| TEST (LockedRobotState, set2) | |
| TEST (LockedRobotState, set3) | |
| TEST (LockedRobotState, mod1) | |
| TEST (LockedRobotState, mod2) | |
| TEST (LockedRobotState, mod3) | |
| TEST (LockedRobotState, set1mod1) | |
| TEST (LockedRobotState, set2mod1) | |
| TEST (LockedRobotState, set1mod2) | |
| TEST (LockedRobotState, set3mod1) | |
| TEST (LockedRobotState, set1mod3) | |
| TEST (LockedRobotState, set3mod3) | |
| TEST (LockedRobotState, set3mod3c3) | |
Variables | |
| static const char * | SRDF_STR |
| static const char * | URDF_STR |
Enumeration Type Documentation
| anonymous enum |
| Enumerator | |
|---|---|
| JOINT_A | |
| JOINT_C | |
| MIM_F | |
| JOINT_F | |
Definition at line 211 of file locked_robot_state_test.cpp.
Function Documentation
|
static |
Definition at line 219 of file locked_robot_state_test.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 614 of file locked_robot_state_test.cpp.
|
static |
Definition at line 271 of file locked_robot_state_test.cpp.
|
static |
Definition at line 477 of file locked_robot_state_test.cpp.
| TEST | ( | LockedRobotState | , |
| load | |||
| ) |
Definition at line 233 of file locked_robot_state_test.cpp.
| TEST | ( | LockedRobotState | , |
| URDF_sanity | |||
| ) |
Definition at line 247 of file locked_robot_state_test.cpp.
| TEST | ( | LockedRobotState | , |
| robotStateChanged | |||
| ) |
Definition at line 276 of file locked_robot_state_test.cpp.
| TEST | ( | LockedRobotState | , |
| set1 | |||
| ) |
Definition at line 549 of file locked_robot_state_test.cpp.
| TEST | ( | LockedRobotState | , |
| set2 | |||
| ) |
Definition at line 554 of file locked_robot_state_test.cpp.
| TEST | ( | LockedRobotState | , |
| set3 | |||
| ) |
Definition at line 559 of file locked_robot_state_test.cpp.
| TEST | ( | LockedRobotState | , |
| mod1 | |||
| ) |
Definition at line 564 of file locked_robot_state_test.cpp.
| TEST | ( | LockedRobotState | , |
| mod2 | |||
| ) |
Definition at line 569 of file locked_robot_state_test.cpp.
| TEST | ( | LockedRobotState | , |
| mod3 | |||
| ) |
Definition at line 574 of file locked_robot_state_test.cpp.
| TEST | ( | LockedRobotState | , |
| set1mod1 | |||
| ) |
Definition at line 579 of file locked_robot_state_test.cpp.
| TEST | ( | LockedRobotState | , |
| set2mod1 | |||
| ) |
Definition at line 584 of file locked_robot_state_test.cpp.
| TEST | ( | LockedRobotState | , |
| set1mod2 | |||
| ) |
Definition at line 589 of file locked_robot_state_test.cpp.
| TEST | ( | LockedRobotState | , |
| set3mod1 | |||
| ) |
Definition at line 594 of file locked_robot_state_test.cpp.
| TEST | ( | LockedRobotState | , |
| set1mod3 | |||
| ) |
Definition at line 599 of file locked_robot_state_test.cpp.
| TEST | ( | LockedRobotState | , |
| set3mod3 | |||
| ) |
Definition at line 604 of file locked_robot_state_test.cpp.
| TEST | ( | LockedRobotState | , |
| set3mod3c3 | |||
| ) |
Definition at line 609 of file locked_robot_state_test.cpp.
Variable Documentation
|
static |
Definition at line 187 of file locked_robot_state_test.cpp.
|
static |
Definition at line 44 of file locked_robot_state_test.cpp.