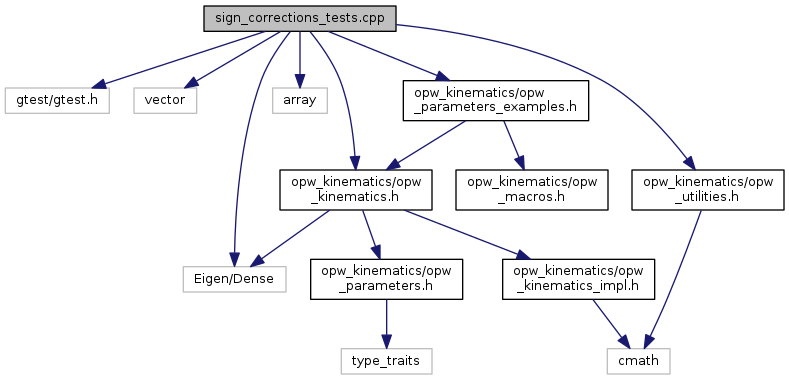
#include <gtest/gtest.h>#include <vector>#include <Eigen/Dense>#include <array>#include "opw_kinematics/opw_kinematics.h"#include "opw_kinematics/opw_parameters_examples.h"#include "opw_kinematics/opw_utilities.h"
Include dependency graph for sign_corrections_tests.cpp:
Go to the source code of this file.
Functions | |
| template<typename T > | |
| void | comparePoses (const Transform< T > &Ta, const Transform< T > &Tb) |
| Compare every element of two eigen Isometry3 poses. More... | |
| int | main (int argc, char **argv) |
| TEST (kuka_kr6, forward_kinematics) | |
| TEST (kuka_kr6, inverse_kinematics) | |
Variables | |
| const double | TOLERANCE = 1e-5 |
Function Documentation
Compare every element of two eigen Isometry3 poses.
Definition at line 17 of file sign_corrections_tests.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 80 of file sign_corrections_tests.cpp.
| TEST | ( | kuka_kr6 | , |
| forward_kinematics | |||
| ) |
Definition at line 37 of file sign_corrections_tests.cpp.
| TEST | ( | kuka_kr6 | , |
| inverse_kinematics | |||
| ) |
Definition at line 55 of file sign_corrections_tests.cpp.
Variable Documentation
| const double TOLERANCE = 1e-5 |
Definition at line 10 of file sign_corrections_tests.cpp.