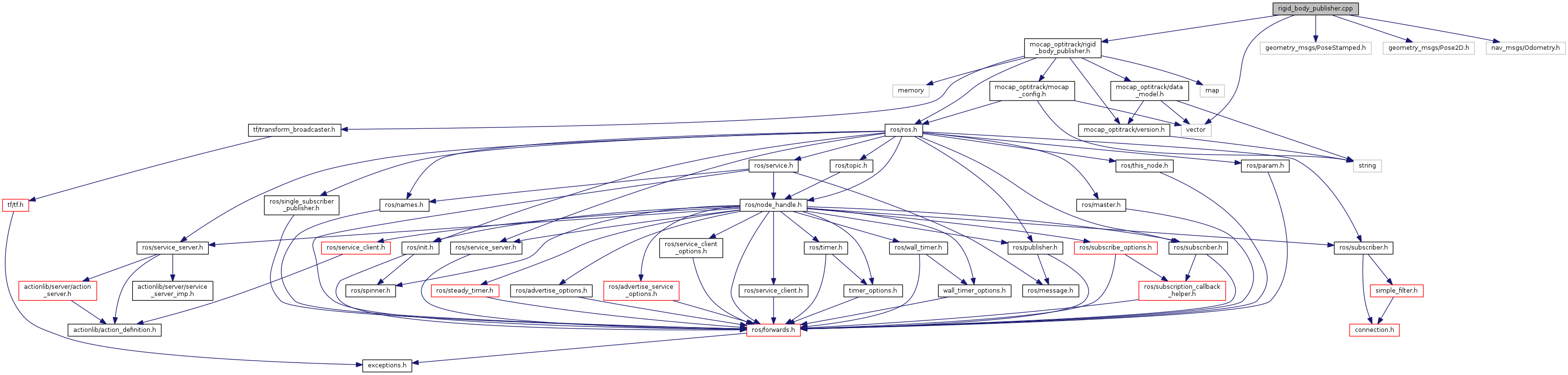
#include <mocap_optitrack/rigid_body_publisher.h>#include <geometry_msgs/PoseStamped.h>#include <geometry_msgs/Pose2D.h>#include <nav_msgs/Odometry.h>#include <vector>
Include dependency graph for rigid_body_publisher.cpp:
Go to the source code of this file.
Namespaces | |
| mocap_optitrack | |
| mocap_optitrack::utilities | |
Functions | |
| nav_msgs::Odometry | mocap_optitrack::utilities::getRosOdom (RigidBody const &body, const Version &coordinatesVersion) |
| geometry_msgs::PoseStamped | mocap_optitrack::utilities::getRosPose (RigidBody const &body, const Version &coordinatesVersion) |