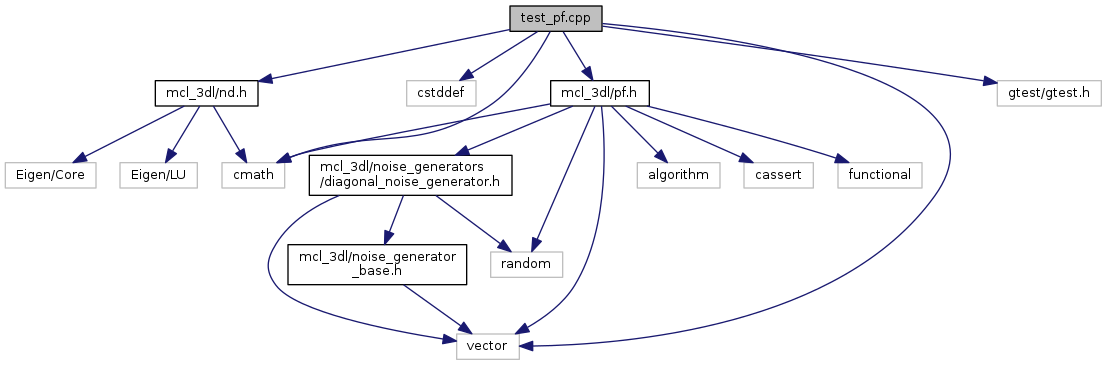
#include <cmath>#include <cstddef>#include <vector>#include <mcl_3dl/nd.h>#include <mcl_3dl/pf.h>#include <gtest/gtest.h>
Include dependency graph for test_pf.cpp:
Go to the source code of this file.
Classes | |
| class | State |
Functions | |
| int | main (int argc, char **argv) |
| TEST (Pf, BayesianEstimation) | |
| TEST (Pf, VariableParticleSize) | |
| TEST (Pf, ResampleFlatLikelihood) | |
| TEST (Pf, ResampleFirstAndLastParticle) | |
| TEST (Pf, Iterators) | |
| TEST (Pf, AppendParticles) | |
| void | testResample (const std::vector< float > &probs, const std::vector< float > &states, const std::vector< float > &expected_resampled_states) |
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 301 of file test_pf.cpp.
| TEST | ( | Pf | , |
| BayesianEstimation | |||
| ) |
Definition at line 78 of file test_pf.cpp.
| TEST | ( | Pf | , |
| VariableParticleSize | |||
| ) |
Definition at line 148 of file test_pf.cpp.
| TEST | ( | Pf | , |
| ResampleFlatLikelihood | |||
| ) |
Definition at line 186 of file test_pf.cpp.
| TEST | ( | Pf | , |
| ResampleFirstAndLastParticle | |||
| ) |
Definition at line 226 of file test_pf.cpp.
| TEST | ( | Pf | , |
| Iterators | |||
| ) |
Definition at line 262 of file test_pf.cpp.
| TEST | ( | Pf | , |
| AppendParticles | |||
| ) |
Definition at line 280 of file test_pf.cpp.
| void testResample | ( | const std::vector< float > & | probs, |
| const std::vector< float > & | states, | ||
| const std::vector< float > & | expected_resampled_states | ||
| ) |
Definition at line 206 of file test_pf.cpp.