#include <aruco_ros/aruco_ros_utils.h>#include <ros/console.h>#include <ros/assert.h>#include <iostream>#include <tf/transform_datatypes.h>
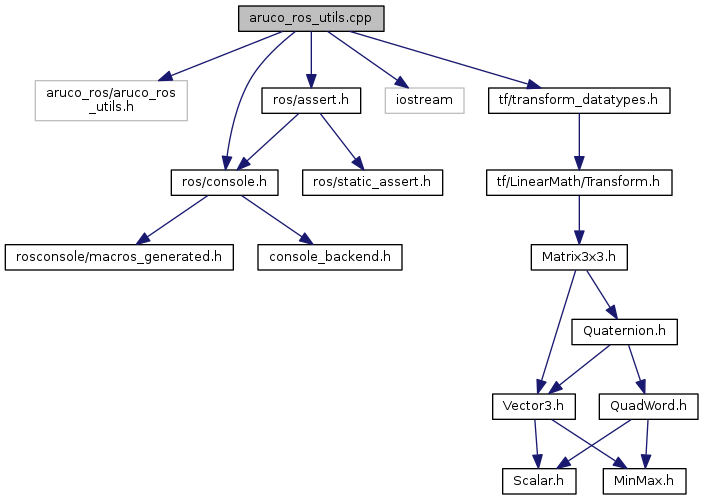
Include dependency graph for old/aruco_ros/src/aruco_ros_utils.cpp:
#include <aruco_ros/aruco_ros_utils.h>#include <ros/console.h>#include <ros/assert.h>#include <iostream>#include <tf/transform_datatypes.h>