#include <DepthStream.hpp>
|
| | DepthStream (Freenect::FreenectDevice *pDevice) |
| |
| OniImageRegistrationMode | getImageRegistrationMode () const |
| |
| OniStatus | getProperty (int propertyId, void *data, int *pDataSize) |
| |
| OniBool | isImageRegistrationModeSupported (OniImageRegistrationMode mode) |
| |
| OniBool | isPropertySupported (int propertyId) |
| |
| OniStatus | setImageRegistrationMode (OniImageRegistrationMode mode) |
| |
| void | buildFrame (void *data, uint32_t timestamp) |
| |
| OniBool | isPropertySupported (int propertyId) |
| |
| virtual OniStatus | setProperty (int propertyId, const void *data, int dataSize) |
| |
| OniStatus | start () |
| |
| void | stop () |
| |
| | VideoStream (Freenect::FreenectDevice *device) |
| |
| virtual OniStatus | convertDepthToColorCoordinates (StreamBase *, int, int, OniDepthPixel, int *, int *) |
| |
| virtual int | getRequiredFrameSize () |
| |
| virtual OniStatus | invoke (int, void *, int) |
| |
| virtual OniBool | isCommandSupported (int) |
| |
| virtual void | notifyAllProperties () |
| |
| virtual void | setNewFrameCallback (NewFrameCallback handler, void *pCookie) |
| |
| virtual void | setPropertyChangedCallback (PropertyChangedCallback handler, void *pCookie) |
| |
| virtual void | setServices (StreamServices *pStreamServices) |
| |
| | StreamBase () |
| |
| virtual | ~StreamBase () |
| |
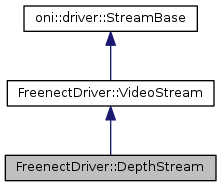
Definition at line 16 of file DepthStream.hpp.
| OniStatus FreenectDriver::DepthStream::getProperty |
( |
int |
propertyId, |
|
|
void * |
data, |
|
|
int * |
pDataSize |
|
) |
| |
|
inlinevirtual |
| static OniSensorInfo FreenectDriver::DepthStream::getSensorInfo |
( |
| ) |
|
|
inlinestatic |
| OniBool FreenectDriver::DepthStream::isPropertySupported |
( |
int |
propertyId | ) |
|
|
inlinevirtual |
| void DepthStream::populateFrame |
( |
void * |
data, |
|
|
OniFrame * |
frame |
|
) |
| const |
|
privatevirtual |
| const unsigned long long FreenectDriver::DepthStream::CONST_SHIFT_VAL = 200 |
|
static |
| const float FreenectDriver::DepthStream::DIAGONAL_FOV = 70 * (M_PI / 180) |
|
static |
| const double FreenectDriver::DepthStream::EMITTER_DCMOS_DISTANCE_VAL = 7.5 |
|
static |
| const unsigned long long FreenectDriver::DepthStream::GAIN_VAL = 42 |
|
static |
| const float FreenectDriver::DepthStream::HORIZONTAL_FOV = 58.5 * (M_PI / 180) |
|
static |
| const unsigned long long FreenectDriver::DepthStream::MAX_SHIFT_VAL = 2047 |
|
static |
| const int FreenectDriver::DepthStream::MAX_VALUE = 10000 |
|
static |
| const unsigned long long FreenectDriver::DepthStream::PARAM_COEFF_VAL = 4 |
|
static |
| const unsigned long long FreenectDriver::DepthStream::SHIFT_SCALE_VAL = 10 |
|
static |
| const float FreenectDriver::DepthStream::VERTICAL_FOV = 45.6 * (M_PI / 180) |
|
static |
| const unsigned long long FreenectDriver::DepthStream::ZERO_PLANE_DISTANCE_VAL = 120 |
|
static |
| const double FreenectDriver::DepthStream::ZERO_PLANE_PIXEL_SIZE_VAL = 0.10520000010728836 |
|
static |
The documentation for this class was generated from the following files:
 Protected Member Functions inherited from oni::driver::StreamBase
Protected Member Functions inherited from oni::driver::StreamBase