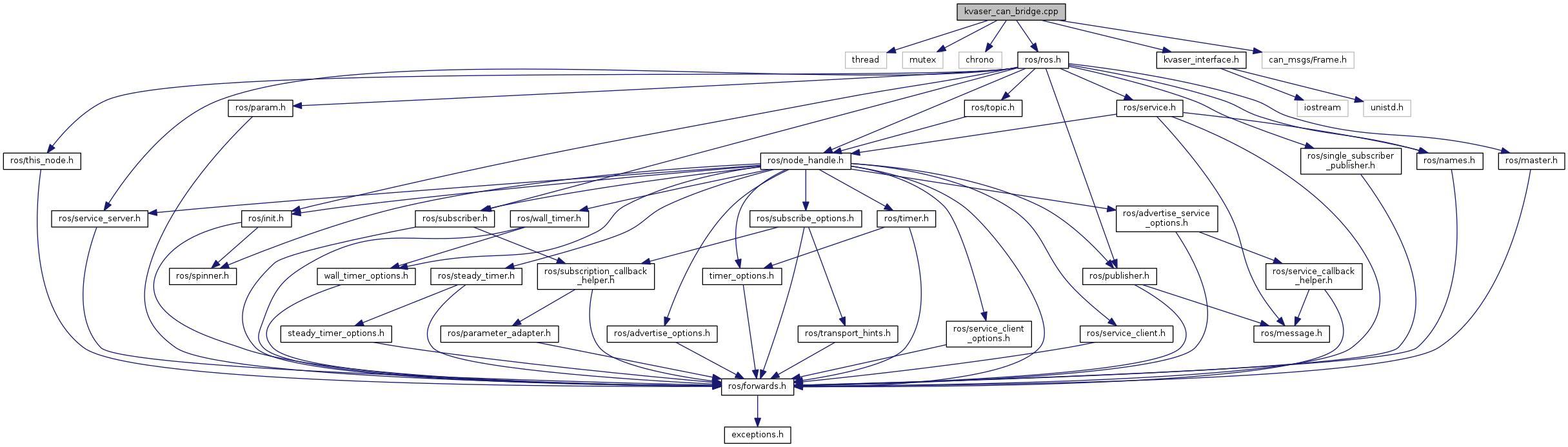
#include <thread>#include <mutex>#include <chrono>#include <ros/ros.h>#include <kvaser_interface.h>#include <can_msgs/Frame.h>
Include dependency graph for kvaser_can_bridge.cpp:
Go to the source code of this file.
Functions | |
| void | can_read () |
| void | can_rx_callback (const can_msgs::Frame::ConstPtr &msg) |
| int | main (int argc, char **argv) |
Variables | |
| int | bit_rate = 500000 |
| KvaserCan | can_reader |
| ros::Publisher | can_tx_pub |
| KvaserCan | can_writer |
| int | circuit_id = 0 |
| bool | global_keep_going = true |
| int | hardware_id = 0 |
| std::mutex | keep_going_mut |
Function Documentation
| void can_read | ( | ) |
Definition at line 26 of file kvaser_can_bridge.cpp.
| void can_rx_callback | ( | const can_msgs::Frame::ConstPtr & | msg | ) |
Definition at line 90 of file kvaser_can_bridge.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 114 of file kvaser_can_bridge.cpp.
Variable Documentation
| int bit_rate = 500000 |
Definition at line 18 of file kvaser_can_bridge.cpp.
| KvaserCan can_reader |
Definition at line 23 of file kvaser_can_bridge.cpp.
| ros::Publisher can_tx_pub |
Definition at line 24 of file kvaser_can_bridge.cpp.
| KvaserCan can_writer |
Definition at line 23 of file kvaser_can_bridge.cpp.
| int circuit_id = 0 |
Definition at line 20 of file kvaser_can_bridge.cpp.
| bool global_keep_going = true |
Definition at line 21 of file kvaser_can_bridge.cpp.
| int hardware_id = 0 |
Definition at line 19 of file kvaser_can_bridge.cpp.
| std::mutex keep_going_mut |
Definition at line 22 of file kvaser_can_bridge.cpp.