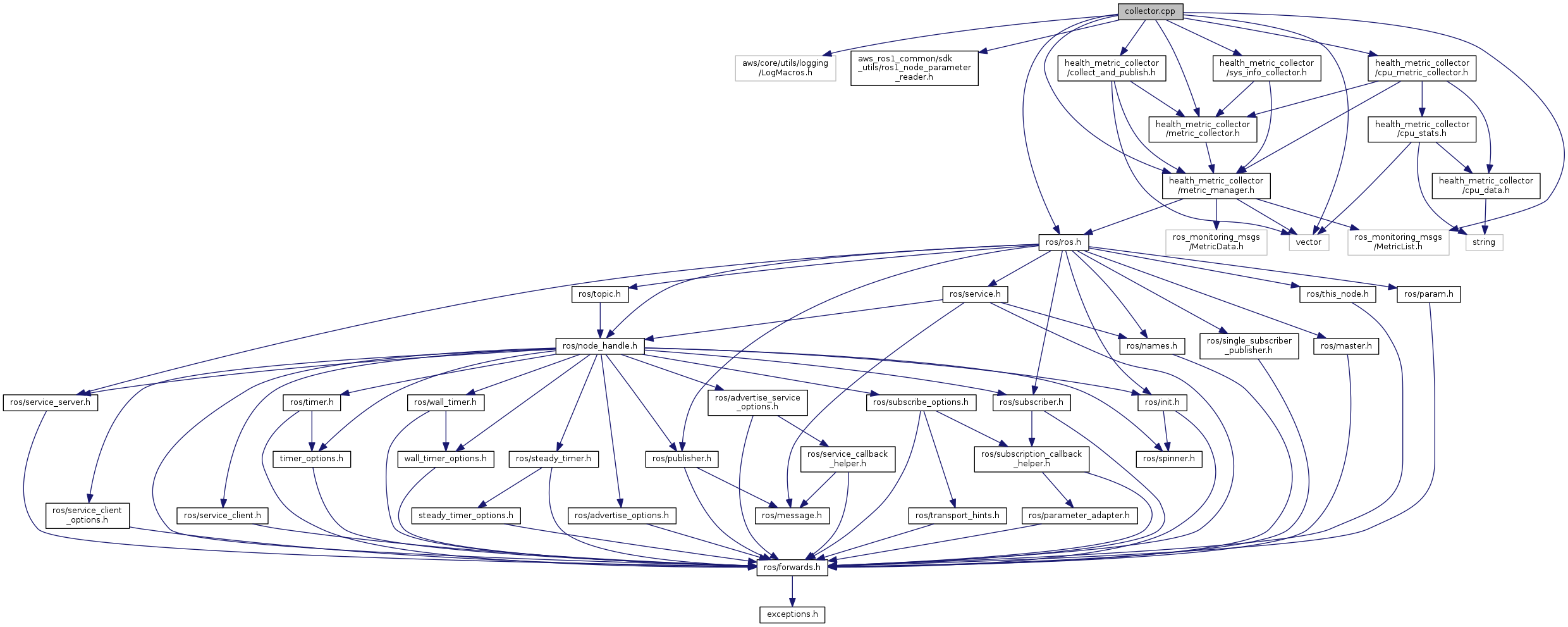
#include <aws/core/utils/logging/LogMacros.h>#include <aws_ros1_common/sdk_utils/ros1_node_parameter_reader.h>#include <health_metric_collector/collect_and_publish.h>#include <health_metric_collector/cpu_metric_collector.h>#include <health_metric_collector/metric_collector.h>#include <health_metric_collector/metric_manager.h>#include <health_metric_collector/sys_info_collector.h>#include <ros/ros.h>#include <ros_monitoring_msgs/MetricList.h>#include <vector>
Include dependency graph for collector.cpp:
Go to the source code of this file.
Macros | |
| #define | CATEGORY_DIMENSION "category" |
| #define | DEFAULT_INTERVAL_SEC 5 |
| #define | DEFAULT_NODE_NAME "health_metric_collector" |
| #define | DEFAULT_ROBOT_ID "Default_Robot" |
| #define | HEALTH_CATEGORY "RobotHealth" |
| #define | INTERVAL_PARAM_NAME "interval" |
| #define | INTERVAL_PARAM_NAME "interval" |
| #define | METRICS_TOPIC_NAME "metrics" |
| #define | ROBOT_ID_DIMENSION "robot_id" |
| #define | TOPIC_BUFFER_SIZE 1000 |
Functions | |
| int | main (int argc, char **argv) |
Macro Definition Documentation
| #define CATEGORY_DIMENSION "category" |
Definition at line 36 of file collector.cpp.
| #define DEFAULT_INTERVAL_SEC 5 |
Definition at line 32 of file collector.cpp.
| #define DEFAULT_NODE_NAME "health_metric_collector" |
Definition at line 39 of file collector.cpp.
| #define DEFAULT_ROBOT_ID "Default_Robot" |
Definition at line 38 of file collector.cpp.
| #define HEALTH_CATEGORY "RobotHealth" |
Definition at line 37 of file collector.cpp.
| #define INTERVAL_PARAM_NAME "interval" |
Definition at line 40 of file collector.cpp.
| #define INTERVAL_PARAM_NAME "interval" |
Definition at line 40 of file collector.cpp.
| #define METRICS_TOPIC_NAME "metrics" |
Definition at line 41 of file collector.cpp.
| #define ROBOT_ID_DIMENSION "robot_id" |
Definition at line 35 of file collector.cpp.
| #define TOPIC_BUFFER_SIZE 1000 |
Definition at line 33 of file collector.cpp.
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 44 of file collector.cpp.