#include <gtsam/slam/RotateFactor.h>#include <gtsam/base/Testable.h>#include <gtsam/nonlinear/NonlinearFactorGraph.h>#include <gtsam/nonlinear/LevenbergMarquardtOptimizer.h>#include <gtsam/base/numericalDerivative.h>#include <CppUnitLite/TestHarness.h>#include <boost/bind.hpp>#include <boost/assign/std/vector.hpp>#include <vector>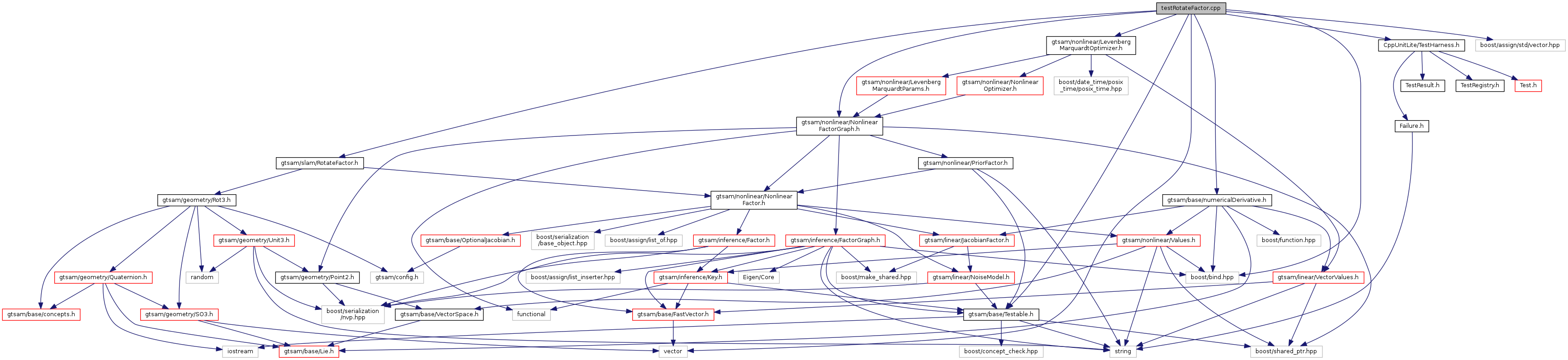
Go to the source code of this file.
Typedefs | |
| typedef noiseModel::Isotropic::shared_ptr | Model |
Functions | |
| static const Point3 | cameraX (0, 1, 0) |
| static const Point3 | cameraY (0, 0, 1) |
| static const Point3 | cameraZ (1, 0, 0) |
| int | main () |
| TEST (RotateFactor, checkMath) | |
| TEST (RotateFactor, test) | |
| TEST (RotateFactor, minimization) | |
| TEST (RotateDirectionsFactor, test) | |
| TEST (RotateDirectionsFactor, minimization) | |
| TEST (RotateDirectionsFactor, Initialization) | |
Variables | |
| static const Rot3 | c1Zc2 = iRc.inverse() * i1Ri2 * iRc |
| static const Rot3 | c2Zc3 = iRc.inverse() * i2Ri3 * iRc |
| static const Rot3 | c3Zc4 = iRc.inverse() * i3Ri4 * iRc |
| static const Rot3 | i1Ri2 = Rot3::AxisAngle(p1, 1) |
| static const Rot3 | i2Ri3 = Rot3::AxisAngle(p2, 1) |
| static const Rot3 | i3Ri4 = Rot3::AxisAngle(p3, 1) |
| static const Rot3 | iRc (cameraX, cameraY, cameraZ) |
| static const double | kDegree = M_PI / 180 |
| static const Unit3 | p1 (1, 0, 0) |
| static const Unit3 | p2 (0, 1, 0) |
| static const Unit3 | p3 (0, 0, 1) |
| static const Unit3 | z1 = iRc.inverse() * p1 |
| static const Unit3 | z2 = iRc.inverse() * p2 |
| static const Unit3 | z3 = iRc.inverse() * p3 |
Typedef Documentation
Definition at line 48 of file testRotateFactor.cpp.
Function Documentation
|
static |
| static const Point3 cameraY | ( | 0 | , |
| 0 | , | ||
| 1 | |||
| ) |
| static const Point3 cameraZ | ( | 1 | , |
| 0 | , | ||
| 0 | |||
| ) |
| int main | ( | void | ) |
Definition at line 232 of file testRotateFactor.cpp.
| TEST | ( | RotateFactor | , |
| checkMath | |||
| ) |
Definition at line 51 of file testRotateFactor.cpp.
| TEST | ( | RotateFactor | , |
| test | |||
| ) |
Definition at line 58 of file testRotateFactor.cpp.
| TEST | ( | RotateFactor | , |
| minimization | |||
| ) |
Definition at line 88 of file testRotateFactor.cpp.
| TEST | ( | RotateDirectionsFactor | , |
| test | |||
| ) |
Definition at line 127 of file testRotateFactor.cpp.
| TEST | ( | RotateDirectionsFactor | , |
| minimization | |||
| ) |
Definition at line 161 of file testRotateFactor.cpp.
| TEST | ( | RotateDirectionsFactor | , |
| Initialization | |||
| ) |
Definition at line 199 of file testRotateFactor.cpp.
Variable Documentation
|
static |
Definition at line 39 of file testRotateFactor.cpp.
|
static |
Definition at line 40 of file testRotateFactor.cpp.
|
static |
Definition at line 41 of file testRotateFactor.cpp.
Definition at line 34 of file testRotateFactor.cpp.
Definition at line 35 of file testRotateFactor.cpp.
Definition at line 36 of file testRotateFactor.cpp.
|
static |
Definition at line 23 of file testRotateFactor.cpp.
|
static |
| const Unit3 p2(0, 1, 0) |
| const Unit3 p3(0, 0, 1) |
|
static |
Definition at line 44 of file testRotateFactor.cpp.
|
static |
Definition at line 45 of file testRotateFactor.cpp.
|
static |
Definition at line 46 of file testRotateFactor.cpp.