unit test implicit jacobian factors More...
#include <gtsam/slam/JacobianFactorQ.h>#include <gtsam/slam/JacobianFactorQR.h>#include <gtsam/slam/RegularImplicitSchurFactor.h>#include <gtsam/geometry/CalibratedCamera.h>#include <gtsam/geometry/Point2.h>#include <gtsam/linear/VectorValues.h>#include <gtsam/linear/NoiseModel.h>#include <gtsam/linear/GaussianFactor.h>#include <gtsam/base/timing.h>#include <boost/assign/list_of.hpp>#include <boost/assign/std/vector.hpp>#include <boost/range/iterator_range.hpp>#include <boost/range/adaptor/map.hpp>#include <CppUnitLite/TestHarness.h>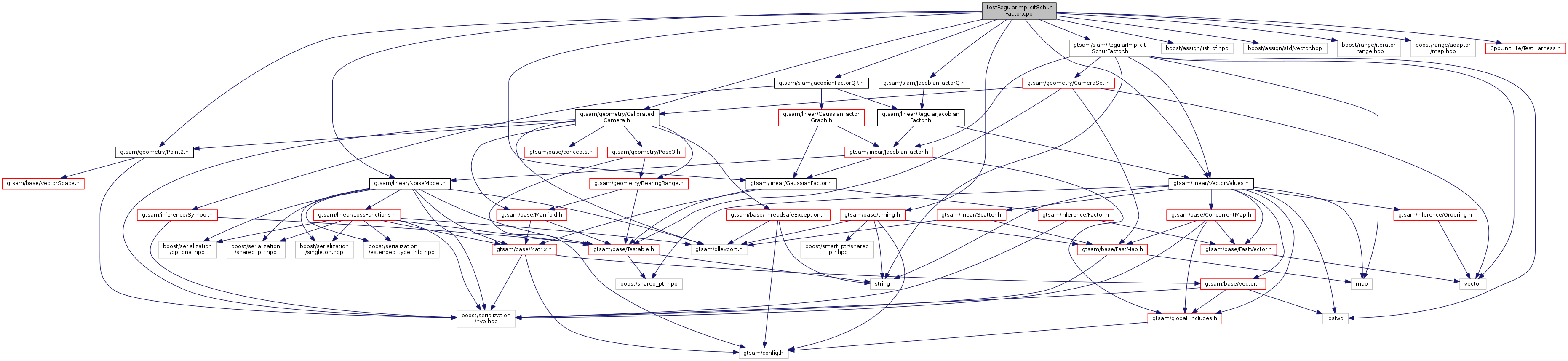
Go to the source code of this file.
Functions | |
| int | main (void) |
| TEST (regularImplicitSchurFactor, creation) | |
| TEST (regularImplicitSchurFactor, addHessianMultiply) | |
| TEST (regularImplicitSchurFactor, hessianDiagonal) | |
Variables | |
| const Vector | b = (Vector(6) << 1., 2., 3., 4., 5., 6.).finished() |
| const Matrix26 | F0 = Matrix26::Ones() |
| const Matrix26 | F1 = 2 * Matrix26::Ones() |
| const Matrix26 | F3 = 3 * Matrix26::Ones() |
| const vector< Matrix26, Eigen::aligned_allocator< Matrix26 > > | FBlocks {F0, F1, F3} |
| const KeyVector | keys {0, 1, 3} |
Detailed Description
unit test implicit jacobian factors
- Date
- Oct 20, 2013
Definition in file testRegularImplicitSchurFactor.cpp.
Function Documentation
| int main | ( | void | ) |
Definition at line 282 of file testRegularImplicitSchurFactor.cpp.
| TEST | ( | regularImplicitSchurFactor | , |
| creation | |||
| ) |
Definition at line 50 of file testRegularImplicitSchurFactor.cpp.
| TEST | ( | regularImplicitSchurFactor | , |
| addHessianMultiply | |||
| ) |
Definition at line 62 of file testRegularImplicitSchurFactor.cpp.
| TEST | ( | regularImplicitSchurFactor | , |
| hessianDiagonal | |||
| ) |
Definition at line 209 of file testRegularImplicitSchurFactor.cpp.
Variable Documentation
Definition at line 47 of file testRegularImplicitSchurFactor.cpp.
| const Matrix26 F0 = Matrix26::Ones() |
Definition at line 41 of file testRegularImplicitSchurFactor.cpp.
| const Matrix26 F1 = 2 * Matrix26::Ones() |
Definition at line 42 of file testRegularImplicitSchurFactor.cpp.
| const Matrix26 F3 = 3 * Matrix26::Ones() |
Definition at line 43 of file testRegularImplicitSchurFactor.cpp.
| const vector<Matrix26, Eigen::aligned_allocator<Matrix26> > FBlocks {F0, F1, F3} |
Definition at line 44 of file testRegularImplicitSchurFactor.cpp.
| const KeyVector keys {0, 1, 3} |
Definition at line 45 of file testRegularImplicitSchurFactor.cpp.