#include <FunctorizedFactor.h>
Public Member Functions | |
| NonlinearFactor::shared_ptr | clone () const override |
| Vector | evaluateError (const T1 ¶ms1, const T2 ¶ms2, boost::optional< Matrix & > H1=boost::none, boost::optional< Matrix & > H2=boost::none) const override |
| FunctorizedFactor2 () | |
| FunctorizedFactor2 (Key key1, Key key2, const R &z, const SharedNoiseModel &model, const FunctionType func) | |
| ~FunctorizedFactor2 () override | |
Testable | |
| void | print (const std::string &s="", const KeyFormatter &keyFormatter=DefaultKeyFormatter) const override |
| print More... | |
| bool | equals (const NonlinearFactor &other, double tol=1e-9) const override |
 Public Member Functions inherited from gtsam::NoiseModelFactor2< T1, T2 > Public Member Functions inherited from gtsam::NoiseModelFactor2< T1, T2 > | |
| Key | key1 () const |
| Key | key2 () const |
| NoiseModelFactor2 () | |
| NoiseModelFactor2 (const SharedNoiseModel &noiseModel, Key j1, Key j2) | |
| Vector | unwhitenedError (const Values &x, boost::optional< std::vector< Matrix > & > H=boost::none) const override |
| ~NoiseModelFactor2 () override | |
| Public Member Functions inherited from gtsam::NoiseModelFactor | |
| shared_ptr | cloneWithNewNoiseModel (const SharedNoiseModel newNoise) const |
| size_t | dim () const override |
| bool | equals (const NonlinearFactor &f, double tol=1e-9) const override |
| double | error (const Values &c) const override |
| boost::shared_ptr< GaussianFactor > | linearize (const Values &x) const override |
| const SharedNoiseModel & | noiseModel () const |
| access to the noise model More... | |
| NoiseModelFactor () | |
| template<typename CONTAINER > | |
| NoiseModelFactor (const SharedNoiseModel &noiseModel, const CONTAINER &keys) | |
| void | print (const std::string &s="", const KeyFormatter &keyFormatter=DefaultKeyFormatter) const override |
| Vector | unweightedWhitenedError (const Values &c) const |
| double | weight (const Values &c) const |
| Vector | whitenedError (const Values &c) const |
| ~NoiseModelFactor () override | |
| Public Member Functions inherited from gtsam::NonlinearFactor | |
| NonlinearFactor () | |
| template<typename CONTAINER > | |
| NonlinearFactor (const CONTAINER &keys) | |
| virtual | ~NonlinearFactor () |
| virtual bool | active (const Values &) const |
| shared_ptr | rekey (const std::map< Key, Key > &rekey_mapping) const |
| shared_ptr | rekey (const KeyVector &new_keys) const |
| Public Member Functions inherited from gtsam::Factor | |
| virtual | ~Factor ()=default |
| Default destructor. More... | |
| Key | front () const |
| First key. More... | |
| Key | back () const |
| Last key. More... | |
| const_iterator | find (Key key) const |
| find More... | |
| const KeyVector & | keys () const |
| Access the factor's involved variable keys. More... | |
| const_iterator | begin () const |
| const_iterator | end () const |
| size_t | size () const |
| virtual void | printKeys (const std::string &s="Factor", const KeyFormatter &formatter=DefaultKeyFormatter) const |
| print only keys More... | |
| KeyVector & | keys () |
| iterator | begin () |
| iterator | end () |
Private Types | |
| using | Base = NoiseModelFactor2< T1, T2 > |
| using | FunctionType = std::function< R(T1, T2, boost::optional< Matrix & >, boost::optional< Matrix & >)> |
Private Member Functions | |
| template<class ARCHIVE > | |
| void | serialize (ARCHIVE &ar, const unsigned int) |
Private Attributes | |
| FunctionType | func_ |
| functor instance More... | |
| R | measured_ |
| value that is compared with functor return value More... | |
| SharedNoiseModel | noiseModel_ |
| noise model More... | |
Friends | |
| class | boost::serialization::access |
Additional Inherited Members | |
| Public Types inherited from gtsam::NoiseModelFactor2< T1, T2 > | |
| typedef T1 | X1 |
| typedef T2 | X2 |
| Public Types inherited from gtsam::NoiseModelFactor | |
| typedef boost::shared_ptr< This > | shared_ptr |
| Public Types inherited from gtsam::NonlinearFactor | |
| typedef boost::shared_ptr< This > | shared_ptr |
| Public Types inherited from gtsam::Factor | |
| typedef KeyVector::const_iterator | const_iterator |
| Const iterator over keys. More... | |
| typedef KeyVector::iterator | iterator |
| Iterator over keys. More... | |
| Protected Types inherited from gtsam::NoiseModelFactor2< T1, T2 > | |
| typedef NoiseModelFactor | Base |
| typedef NoiseModelFactor2< T1, T2 > | This |
| Protected Types inherited from gtsam::NoiseModelFactor | |
| typedef NonlinearFactor | Base |
| typedef NoiseModelFactor | This |
| Protected Types inherited from gtsam::NonlinearFactor | |
| typedef Factor | Base |
| typedef NonlinearFactor | This |
| Protected Member Functions inherited from gtsam::NoiseModelFactor | |
| NoiseModelFactor (const SharedNoiseModel &noiseModel) | |
| Protected Member Functions inherited from gtsam::Factor | |
| Factor () | |
| template<typename CONTAINER > | |
| Factor (const CONTAINER &keys) | |
| template<typename ITERATOR > | |
| Factor (ITERATOR first, ITERATOR last) | |
| bool | equals (const This &other, double tol=1e-9) const |
| check equality More... | |
| Static Protected Member Functions inherited from gtsam::Factor | |
| template<typename CONTAINER > | |
| static Factor | FromKeys (const CONTAINER &keys) |
| template<typename ITERATOR > | |
| static Factor | FromIterators (ITERATOR first, ITERATOR last) |
| Protected Attributes inherited from gtsam::NoiseModelFactor | |
| SharedNoiseModel | noiseModel_ |
| Protected Attributes inherited from gtsam::Factor | |
| KeyVector | keys_ |
| The keys involved in this factor. More... | |
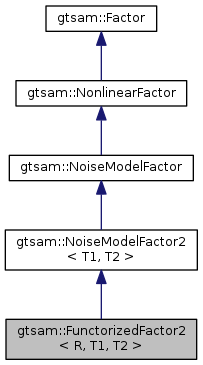
Detailed Description
template<typename R, typename T1, typename T2>
class gtsam::FunctorizedFactor2< R, T1, T2 >
Factor which evaluates provided binary functor and uses the result to compute error with respect to the provided measurement.
Template parameters are
- Parameters
-
R The return type of the functor after evaluation. T1 The first argument type for the functor. T2 The second argument type for the functor.
Definition at line 158 of file FunctorizedFactor.h.
Member Typedef Documentation
|
private |
Definition at line 160 of file FunctorizedFactor.h.
|
private |
Definition at line 165 of file FunctorizedFactor.h.
Constructor & Destructor Documentation
|
inline |
default constructor - only use for serialization
Definition at line 170 of file FunctorizedFactor.h.
|
inline |
Construct with given x and the parameters of the basis
- Parameters
-
key Factor key z Measurement object of same type as that returned by functor model Noise model func The instance of the functor object
Definition at line 179 of file FunctorizedFactor.h.
|
inlineoverride |
Definition at line 186 of file FunctorizedFactor.h.
Member Function Documentation
|
inlineoverridevirtual |
- Returns
- a deep copy of this factor
Reimplemented from gtsam::NonlinearFactor.
Definition at line 189 of file FunctorizedFactor.h.
|
inlineoverridevirtual |
Check if two factors are equal
Reimplemented from gtsam::NonlinearFactor.
Definition at line 217 of file FunctorizedFactor.h.
|
inlineoverridevirtual |
Override this method to finish implementing a binary factor. If any of the optional Matrix reference arguments are specified, it should compute both the function evaluation and its derivative(s) in X1 (and/or X2).
Implements gtsam::NoiseModelFactor2< T1, T2 >.
Definition at line 194 of file FunctorizedFactor.h.
|
inlineoverridevirtual |
|
inlineprivate |
Definition at line 229 of file FunctorizedFactor.h.
Friends And Related Function Documentation
|
friend |
Serialization function
Definition at line 227 of file FunctorizedFactor.h.
Member Data Documentation
|
private |
functor instance
Definition at line 166 of file FunctorizedFactor.h.
|
private |
value that is compared with functor return value
Definition at line 162 of file FunctorizedFactor.h.
|
private |
noise model
Definition at line 163 of file FunctorizedFactor.h.
The documentation for this class was generated from the following file: